Calibration of an ABB IRB 120 industrial robot with a FARO laser tracker

HTML-код
- Опубликовано: 9 апр 2015
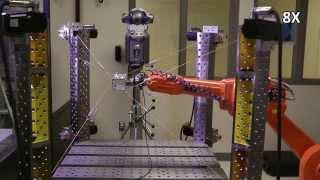
- This work was realized by Martin Gaudreault, Master's student in our lab, as part of a graduate course in robotics. He calibrated our ABB IRB 120 using our FARO ION laser tracker. Out of 1000 random configurations, 50 arbitrary configurations were selected for identification of the geometric and non-geometric parameters of the robot and 950 for validation.
Position errors of the robot before calibration:
Average : 1.746 mm
Median: 1.567 mm
Std. Dev.: 1.043 mm
Min: 0.050 mm
Max: 4.423 mm
Position errors of the robot after calibration:
Average: 0.193 mm
Median: 0.180 mm
Std. Dev.: 0.085 mm
Min: 0.010 mm
Max: 0.516 mm
Pretty good for a robot that costs only $25,000.  Наука
Наука








frequncy of Calibration ,Means duration of Calibration period????
Excuseme, how can you calibrate the the offset between the offline simulation and the real frame of a fixture using a Laser tracker and a FANUC robot.