Industrial robot calibration with Laser Tracker

HTML-код
- Опубликовано: 5 окт 2024
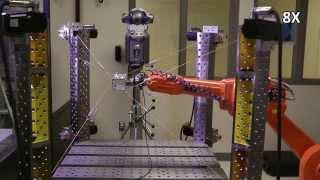
- The objective is to calibrate the kinematic parameters of an industrial robot using laser tracker technology. The idea is to identify precise kinematic parameters to provide the robots with absolute precision to develop more precise applications based on corrected programs.
#IndustrialRobots #RobotCalibration #Precision
More information in
www.tekniker.e...








Very nice application. How much was the initial distance and position accuracy? Thanks
Hello Anderson, the researchers from the mechanical engineering unit will contact you to give the technical details.Thank you very much.