Novel, affordable device for industrial robot calibration

HTML-код
- Опубликовано: 23 апр 2020
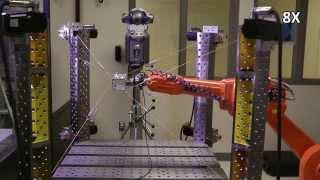
- The new device, called TriCal, is essentially a fixture holding three digital indicators, orthogonal to each other. The device, to be mounted on the flange of an industrial robot, is used for centering the robot TCP (tool center point) onto each of several fixed datum balls.
The calibration process shown here consists of probing each of the four datum balls with 20 different orientations. The accuracy of the calibrated robot is then measured with a FARO laser tracker in 500 random robot joint sets. The whole measurement procedure, both with TriCal and with the FARO laser tracker, is integrated in RoboDK and fully automated.
The mean position error after calibration is 0.326 mm, the maximum error is 0.624 mm, and the standard deviation is 0.107 mm. In comparison, when calibrating the robot with the laser tracker (using 80 measurements for the identification), the mean position error after calibration is 0.231 mm, the maximum error is 0.539 mm, and the standard deviation is 0.087 mm.
Several units of TriCal are available for sale (exclusive of the Sylvac digital indicators and the 3D ball artifact).  Наука
Наука








This is magic!
Great job. Could you share the 3D files for the designed device? Appreciate the help. Kind regards.
Hanzhen harmonic gear , over 30 years experience , robot arm gear