Rubik's Cube Manipulation Using a High-speed Robot Hand

HTML-код
- Опубликовано: 25 сен 2018
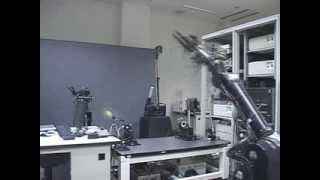
- We realized manipulation of Rubik's cube using a high-speed robot hand with three fingers. The experimental system consists of a high-speed vision and a high-speed robot hand, and the high-speed vision can calculate the center of gravity position and angle of the Rubik's cube at 500 fps.
The manipulation realized in this research is a total of three operations, two kinds of regrasping and one-face turning of the Rubik’s cube. By combining these three operations all the faces can be turned. In the experiment, these three operations were performed in a row in 1 second and we succeeded in 30 continuous operations in 10 seconds.
ishikawa-vision.org/fusion/Rub...  Наука
Наука








I like the way it tosses it at you when it's finished.
This will revolutionize the adult toy industry.
Is this the same super speed manipulator from some of the other videos on this channel? I've been looking through their site for a paper about how that works but I haven't found anything
Yes, i am looking for their channel since that time. It was one video, but later was cut on segments. Probably for education purpose and fast demonstration.
this? ruclips.net/video/-KxjVlaLBmk/видео.html
Would it be possible to adjust the misalignment of the rows with the robot's fingers instead of using the table?
Absolutely but you'd need to detect the misalignment which means more cameras and more code. With just a top-down view I don't think it would be feasible.
@@julian1000 it's feasible for us to see the misalignment from the top view on our 2d screens. With machine learning vision, why could the algorithm not determine the same?
What about solving the cube?
最後のデコピン草
I want that gts3m cube
am i the only one that feel, the robot gonna fail