Robot calibration using a touch probe

HTML-код
- Опубликовано: 27 янв 2014
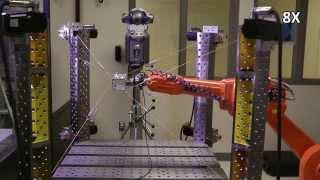
- A Renishaw MP250 touch probe is mounted on a FANUC LR Mate 200iC industrial robot. The robot probes a grid of 100 points on each of four of the planes of a grade A 9" datum cube from Standridge Granite (costs about $1,400). Some of the probing configurations are used for calibrating the robot using a non-kinematic model (DH parameters as well as stiffness parameters). After the parameters of the new robot mathematical model are estimated, the accuracy of the calibrated robot is validated by probing three 2" datum spheres separated at precisely known distances (measured on a CMM). The spheres are mounted on a plate that is installed in several different orientations (only one is shown in this video).
For the 15 distances measured between the centers of pairs of spheres (each distance about 300 mm), the mean error after calibration was 0.152 mm, the maximum being 0.273 mm. The mean error in measuring the diameter of a 2" datum sphere, after calibration, was only 0.026 mm!
Special thanks to GE Aviation Bromont (Canada) for lending us the robot.  Наука
Наука








CoRoETS , could you pls show me the principle of calibrating robot? thanks in advance.
Very cool! What was the mean error prior to calibration?
For the 15 distances measured between the centers of pairs of spheres (each distance about 300 mm), the mean error BEFORE calibration was 0.700 mm and the maximum 1.321 mm. The mean error in measuring the diameter of a 2" datum sphere, BEFORE calibration, was 0.066 mm.
Check this video too: ruclips.net/video/8jxsDcbf-L0/видео.html
CoRoETS Very impressive! Nice work. That's an awesome cost improvement (and seemingly better results!) over the techniques shown in your other video linked above - though the other certainly has a lot of thought provoking methods. Definitely inspiring!
Did you perform a test using 10,000 arbitrary positions and a laser tracker similar to what was mentioned for the testing in your other video?
Relative to that question, how large of a workspace do you find that the accuracy holds after this type of calibration?
Joel Howard The only validation we did is the one shown in the second part of this video: probing three datum spheres at precisely known distances. We did that in about five different orientations of the triangular fixture with the balls (it is mounted on a ball and socket joint). Definitely, the robot's accuracy will be worse outside the volume in front of the robot.
CoRoETS Understandable. Still very cool, and definitely very applicable for localized operations with tight tolerances. Again, very impressive work!!
Can you obtain the TCP only doing probing in a single sphere?
Yes, we can.
Awesome! I am trying to do the same.
Could it be possible that you can give me an advise or some guidance here?
Start with an initial good estimate of the TCP position with respect to the robot's mechanical interface coordinate system. This can be obtained with a special routine on most robots. Or, take the CAD values.
Then, touch probe as much as possible of the ball's surface 9 (e.g.,at 20 points). Then, assume that your robot is perfect (which of course is wrong) and consider that only the position of the TCP is to be optimized. Fit all points on a sphere of known radius (the radius of the sphere plus the radius of the ruby.) Then use some kind of optimization method to minimize the distance errors between the points and the sphere.
Sorry, that's not a very scientific explanation, but it's vacation time ;)
hahahah thanks for the explanation. i would like to learn from from this if you come back from vacations :) have a good time