Thank you very much for the lecture. I found a lot of lessons about jacobian matrix, but none of them showed real aplications. Also, this was very well explained, it really helped a lot
Very well explained ma'am.. love and good wishes from sukkur IBA University. You have make this course easy for me. Even my professor listen your lectures ❤️
I am taking a course in robotics and whatever the instructor teaches I don't understand. So I check your video every time I need to learn something and you never disappoint me! You have a very nice way of explaining difficult things. One correction- for z(dot) I think it should be 2a2*C(theta2)*theta2(dot). Keep up your nice work!
You're right! At about 16:29, there is a missing factor of 2 in the Zdot equation in the upper right-hand corner. The 2 appears in the third row of the matrix, but doesn't make it into the equation written out above. Thanks!
@@asodemann3 hmmm i think both of u are wrong , there shouldnt be a 2 after the R_0_1 cross (d_0_2 - d_0_1) at 13:52. The cross product answer is a2*C(theta2) instead of 2*a2*C(theta2). Hence without the 2, at about 16:29, the answer a2*C(theta2)*theta2(dot) is correct
At 13:52 while doing the cross product, by factorizing (a2*c(th2)*s^2(th1) + a2*c(th2)*c^2(th1)) which left the (Sin^2 plus Cos^2). There would be no 2 indeed.
dear professor I really learnt a lot from your videos regarding robotics course because of very very clear and good explanation of such a difficult topics with the help of demonstrations. I need to understand robot dynamics (Euler Lagrange formulation) a topic which is bothering me so much
It's awsome the way you explain the method, thanks and keep it that way. I just have one question, where did you get the 2 after the R_0_1 cross (d_0_2 - d_0_1), because I got (a2*c(th2)*s^2(th1) + a2*c(th2)*c^2(th2)) and you can factorize using the identity a2*c(th2)*[s^2(th1)+c^2(th1)], the 2 of the third element at 13:51 . Thank you
same man i got the same ans as you by factorizing (a2*c(th2)*s^2(th1) + a2*c(th2)*c^2(th1)) which left the (Sin^2 plus Cos^2). There would be no 2 indeed.
Hi ma'am thanks a lot for the explanation...But Got a question if we got a Robot with 7 Joint(mean when the robot is redundant) how do we procede? Thanks
If you visit my website www.robogrok.com you can see the whole series of videos including how to find the tables. From the home page, go to Robotics 2, then Jacobi an.
Thnak u very much for your contributions. Jacobian matrix last column 3 rd line should be a2c2 , not 2a2c2 , I guess. as a result of the vector products. ( s1s1a2c2+c1c1a2c2 = (s1s1+c1c1)a2c2=a2c2
[question]: Using your convention of putting Joint #1 at the bottom left of the screen, suppose that your Robot had a Joint #4, and that Joint #4 was a Prismatic Joint that, when extending, goes horizontally LEFTWARD on the Screen. Obviously, POSITIVE [Z ₄] would be horizontal, and would point towards the Left side of the Screen. How would the associated [X ₄] and [Y ₄] be oriented, and in which direction would the POSITIVE axis (of each) point?
Hi, Angela. Thank you for this great series. I'm having trouble understanding how you came up with the Jacobian values of the linear and rotational parts for prismatic and revolute joints. I checked your website, but couldn't find it.
Can you link me to the next video where you apply this. On your website the Jacobian Interactive Practice is empty. Or is it in a future series in robotics 2?
Does the jacobian need to be updated at every instance along a linear trajectory? I would think so since the rotation matrices are changing constantly, is this correct?
The symbolic form doesn't change, but when you are actually using it to do something like control the velocity of the end-effector, you have to re-compute the values constantly. If you watch the next videos in this series, I will show an example of writing some code to do this, and you will see that we have to have the Jacobian inside of a loop for this reason. If you have trouble navigating this series within youtube, you can go to my website www.robogrok.com where the videos are arranged in a course map that is easier to follow.
Can the inverse of Jacobian be used in order to find the joint speeds? if yes how will it be possible if the jacobian matrix is not a square matrix like in this example?
Good day, Ma'am. May I kindly ask if the next video for "testing the Jacobian Matrix by writing the code in Python" is available? If so, where can I find it? Thank you
@@KennethFajardo-n9y the easiest way to navigate through the videos is on my website, www.robogrok.com. There, the videos are all arranged in order like a map. To find this video and the ones that come after it, start by clicking on Robotics 2
Take a look at my website, www.robogrok.com. Then, go to the class 'Robotics 1'. Rotation matrices are at the beginning of the 'map' that you see there.
The (d_0_3 - d_0_0) i.e., difference in origins, that is computed before performing the cross product in the linear velocity elements of the Jacobian matrix is computed in different ways compared to both videos. In the '2 2 1 Lecture Video 5 of 6 Jacobian Matrix Explanation', The (d_0_3 - d_0_0) in computed by adding all the elements in the 4th coloumn of the H_0_1,H_1_2 and H_2_3 matrices. Whereas in this video, the (d_0_2 - d_0_0) is considered as 4th coloumn of H_0_2 matrix. You can identify the difference by watching the "2 2 1 Lecture Video 5 of 6 Jacobian Matrix Explanation" from 0:00 to 7:00 and this current video from 11:00 to 14:30.
You're right! It looks like I made a mistake on that other video. You can't get d_0_2 by simply adding d_0_1+d_1_2, because these vectors are measured in different frames. Instead, you have to get d_0_2 from the H_0_2 matrix, since multiplying together H_0_1*H_1_2 accounts for the rotation and puts the displacement vectors in the same frame. The way it is done in this video is the correct way.







When I listened to my professor, I thought he was speaking in tongues, you make it so easy. heaven sent
You are the saviour no one explained this so easily ever
Thank you very much for the lecture. I found a lot of lessons about jacobian matrix, but none of them showed real aplications. Also, this was very well explained, it really helped a lot
crystal clear definitions, you are a godsend!
You're incredible, crisp quality, simple explanation. Thank you so much!!!
oh hai :v
@@eyadsaad5114 😂😂😂😂
simp
I have an Exam tomorrow and you literally saved me, Thank you for these amazing lectures.
شيء غريب جدا اني اشوف كومنتك هنا بس اعتقد انك كنت instructor ل IMT ؟
@@incel007 الدنيا صغيرة فعلًا.. ايوة كنت هناك فترة :D
thanks, this is very organized, explained well and easy to understand !
Very well explained ma'am.. love and good wishes from sukkur IBA University. You have make this course easy for me. Even my professor listen your lectures ❤️
I am taking a course in robotics and whatever the instructor teaches I don't understand. So I check your video every time I need to learn something and you never disappoint me! You have a very nice way of explaining difficult things.
One correction- for z(dot) I think it should be 2a2*C(theta2)*theta2(dot).
Keep up your nice work!
You're right! At about 16:29, there is a missing factor of 2 in the Zdot equation in the upper right-hand corner. The 2 appears in the third row of the matrix, but doesn't make it into the equation written out above. Thanks!
@@asodemann3 hmmm i think both of u are wrong , there shouldnt be a 2 after the R_0_1 cross (d_0_2 - d_0_1) at 13:52. The cross product answer is a2*C(theta2) instead of 2*a2*C(theta2). Hence without the 2, at about 16:29, the answer a2*C(theta2)*theta2(dot) is correct
At 13:52 while doing the cross product, by factorizing (a2*c(th2)*s^2(th1) + a2*c(th2)*c^2(th1)) which left the (Sin^2 plus Cos^2). There would be no 2 indeed.
I love you!
You saved me from my frustration !!!!!
THIS IS AMAZING CLEAR!!!
Oh damn, this is so easy to understand. Thank you so much
what a incredible teacher thank you a lot
Mam the way you explained is awesome
dear professor I really learnt a lot from your videos regarding robotics course because of very very clear and good explanation of such a difficult topics with the help of demonstrations. I need to understand robot dynamics (Euler Lagrange formulation) a topic which is bothering me so much
Thank you very much! You are saving my degree :)
It's awsome the way you explain the method, thanks and keep it that way. I just have one question, where did you get the 2 after the R_0_1 cross (d_0_2 - d_0_1), because I got (a2*c(th2)*s^2(th1) + a2*c(th2)*c^2(th2)) and you can factorize using the identity a2*c(th2)*[s^2(th1)+c^2(th1)], the 2 of the third element at 13:51 . Thank you
same man i got the same ans as you by factorizing (a2*c(th2)*s^2(th1) + a2*c(th2)*c^2(th1)) which left the (Sin^2 plus Cos^2). There would be no 2 indeed.
Yeah same I think the 2 there is a mistake
I was checking the comments to make sure this mistake, and apparently, it is indeed a mistake.
Hi ma'am thanks a lot for the explanation...But Got a question if we got a Robot with 7 Joint(mean when the robot is redundant) how do we procede?
Thanks
It's like Dora for engineers! Nice lecture, very easy to follow, thank you
Thank you for the content. Just wondering on how to come up with these tables?
If you visit my website www.robogrok.com you can see the whole series of videos including how to find the tables. From the home page, go to Robotics 2, then Jacobi an.
saving my life right now fam
Awesome way of explaining things!
In your H02 matrix how did you get column 1 row 3 as "0" shouldn't it be "S(theta2)"?
Yep. Its a mistake. Triplechecked
Thnak u very much for your contributions. Jacobian matrix last column 3 rd line should be a2c2 , not 2a2c2 , I guess. as a result of the vector products. ( s1s1a2c2+c1c1a2c2 = (s1s1+c1c1)a2c2=a2c2
yeah it is correct! I checked it 100 times!
@@elahe4737 By correct do you mean it should be "a2c2" and not "2a2c2" ??
Also Thank you very much for the informative videos 😄
@@amey806 yeah a little mistake in video I think
You should proud for this video. Thank you :)
perfectly explained. thank you so much!
can I know in which video u explained about FINDING R01, R02
In her video, Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P3 (Rotation Matrix Examples)
@@torkelthunefladstad Thanks!
Do you have tutorials on ML too? I am a thermal guy but taking a robotics class. Thanks, professor. You are incredible...
thank you very much, your lecture is great..... now i have aperfect understanding about robotics
Hello thank you for the lesson. I want to ask, if there is a fixed joint, what is the formula for fixed joint?
Thank you
excuse me mam, why did you took 3 column at 13:40 to make calculations, in that rotation matrcix, you could have choosen first column too.
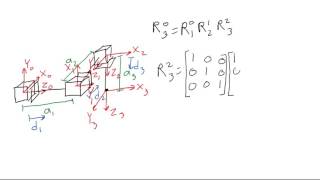
I took the third column because R0_1 is multiplied by the vector [0 0 1]. When you multiply a 3x3 matrix by this vector, you get the third column.
@@asodemann3 oh i got it. thank you for your reply. and we appreciate for the videos.
[question]: Using your convention of putting Joint #1 at the bottom left of the screen, suppose that your Robot had a Joint #4, and that Joint #4 was a Prismatic Joint that, when extending, goes horizontally LEFTWARD on the Screen. Obviously, POSITIVE [Z ₄] would be horizontal, and would point towards the Left side of the Screen. How would the associated [X ₄] and [Y ₄] be oriented, and in which direction would the POSITIVE axis (of each) point?
Hi, Angela. Thank you for this great series. I'm having trouble understanding how you came up with the Jacobian values of the linear and rotational parts for prismatic and revolute joints. I checked your website, but couldn't find it.
Impressive and easy.. REALLY THANKS!!
good lord aren't you just amazing
Can you link me to the next video where you apply this. On your website the Jacobian Interactive Practice is empty. Or is it in a future series in robotics 2?
Does the jacobian need to be updated at every instance along a linear trajectory? I would think so since the rotation matrices are changing constantly, is this correct?
The symbolic form doesn't change, but when you are actually using it to do something like control the velocity of the end-effector, you have to re-compute the values constantly. If you watch the next videos in this series, I will show an example of writing some code to do this, and you will see that we have to have the Jacobian inside of a loop for this reason. If you have trouble navigating this series within youtube, you can go to my website www.robogrok.com where the videos are arranged in a course map that is easier to follow.
Can the inverse of Jacobian be used in order to find the joint speeds? if yes how will it be possible if the jacobian matrix is not a square matrix like in this example?
Good day, Ma'am. May I kindly ask if the next video for "testing the Jacobian Matrix by writing the code in Python" is available? If so, where can I find it? Thank you
@@KennethFajardo-n9y the easiest way to navigate through the videos is on my website, www.robogrok.com. There, the videos are all arranged in order like a map. To find this video and the ones that come after it, start by clicking on Robotics 2
You are the BEST!
You did amazing
how can we multiply 3*1 to 3*1 matrices?
great job!
lmao better then uni education that I paid for, thank you so much
can I just check how did frame 0 change to frame 1?
Perfect!!thank you
Thank you
Good video
Can you please provide the link for how to solve for those rotation matrices like R01 !! Thanks in advance
Take a look at my website, www.robogrok.com. Then, go to the class 'Robotics 1'. Rotation matrices are at the beginning of the 'map' that you see there.
if i have a transformation matrix for frame 0 to1 , How can i find the transformation matrix for 1 to 0 using that matrix ??
The transformation matrix H1_0 is the matrix inverse of the matrix H0_1.
GOLDEN
How to find R01and R02?
bro it's better for you to check earlier courses but, it is related to axis of joint in denevit hartenberg concept.
great!
Hi Dear, I have some doubts about Jacobian Section. How do I contact you?
Hanzhen harmonic gear , robot gear, , over 30 years experience
Oh my God
The method used to write the jacobian matrix in the "2 2 1 Lecture Video 5 of 6 Jacobian Matrix Explanation" and that of this video are different.
In what way?
The (d_0_3 - d_0_0) i.e., difference in origins, that is computed before performing the cross product in the linear velocity elements of the Jacobian matrix is computed in different ways compared to both videos. In the '2 2 1 Lecture Video 5 of 6 Jacobian Matrix Explanation', The (d_0_3 - d_0_0) in computed by adding all the elements in the 4th coloumn of the H_0_1,H_1_2 and H_2_3 matrices. Whereas in this video, the (d_0_2 - d_0_0) is considered as 4th coloumn of H_0_2 matrix.
You can identify the difference by watching the "2 2 1 Lecture Video 5 of 6 Jacobian Matrix Explanation" from 0:00 to 7:00 and this current video from 11:00 to 14:30.
You're right! It looks like I made a mistake on that other video. You can't get d_0_2 by simply adding d_0_1+d_1_2, because these vectors are measured in different frames. Instead, you have to get d_0_2 from the H_0_2 matrix, since multiplying together H_0_1*H_1_2 accounts for the rotation and puts the displacement vectors in the same frame. The way it is done in this video is the correct way.
Thanks for your clarification. This helped :D
U dont how to do vedio lucturer ...u said its in the previous vedio and where is the part 1 of jaccobian matrix ....