✍Any Questions, doubts, or thoughts? Comment below (I read & respond to every comment). 👉Don't forget to SUBSCRIBE to the channel for more such videos & courses: bit.ly/Engineering-Simplified
You have a talent of explaining complex things in a short time. Im currently doing my thesis on robot manipulator and this has been an incredibly helpful video. Thank you teacher!
Thank you! I try my best and I become so happy when someone appreciates the effort. Best of luck for your thesis! I too did a thesis on robotics, specifically on path planning of multiple industrial robots. If you are interested, you can check it out here: etd.ohiolink.edu/acprod/odb_etd/etd/r/1501/10?clear=10&p10_accession_num=dayton1701617256204635
Excited to have you here. I definitely will. Until the next video, try catching up on the previous videos in this series. I guess I have already made 10+
Hi, Thanks for explaining well. I read some textbooks where for jacobian matrices will produce a 6xn matrix, where n is the number of DOF. What is the difference with the 3x3 matrix you described?
The 3x3 matrix that I talk about is for a planar robot. It is quite intuitive since if you think about a planar robot holding something with its end-effector then it can only move it in X and Y direction and rotate it in the plane. It generally has a 3DOF. The linear velocity is therefore just Xdot and Ydot and the angular velocity is w about the x-axis (out of the plane). For a spatial robot holding something, it can move the object in X, Y and Z directions and rotate it in three different ways (roll, pitch, yaw). Therefore the linear velocity is comprised of Xdot, Ydot, and Zdot and the angular velocity also has three components (one about each axis-X, Y, Z). Hence, generally, a spatial robot with a 6 DOF has a 6x6 Jacobian matrix. If you take away its ability to move in one direction, then the Jacobian matrix's one column corresponding to that particular motion disappears and it becomes 6x5, and so on. Hope it makes sense.
@@EngineeringSimplified I'm trying to find jacobian for the articulated manipulator and get the angular velocity results -cos and sin on the matrix. But I find this strange, how can angular velocity produce a function of cos and sin instead of 1 or 0. but this is also the same result when I read some journals. Are my results correct or not?
@@AbdulRahman-jz3px If I understand you correctly, the Homogeneous transformation matrix that you get has cos and sin terms (4 terms for a planar case & 9 terms for the spatial case). To find angular velocities, you take the derivative of 'x' in the sin(x) and cos(x) terms. This is because the 'x' represents the angle of rotation and to find the angular velocity, you differentiate the angular displacement with respect to time. Hope it makes sense.
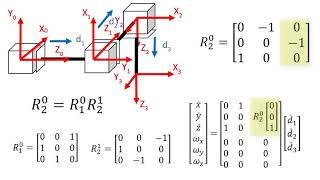
The Jacobian matrix relates the joint space to the end-effector space. In the previous example, we only had angles as joint parameters so the 3x1 matrix only had thetadots. Now, we have both prismatic joints and revolute joints so the 3x1 matrix will need to have both the thetadots(s) corresponding to revolute joints and Ldot(s) corresponding to the prismatic joint(s). Does that make sense?








✍Any Questions, doubts, or thoughts? Comment below (I read & respond to every comment).
👉Don't forget to SUBSCRIBE to the channel for more such videos & courses: bit.ly/Engineering-Simplified
You have a talent of explaining complex things in a short time. Im currently doing my thesis on robot manipulator and this has been an incredibly helpful video. Thank you teacher!
Thank you! I try my best and I become so happy when someone appreciates the effort. Best of luck for your thesis!
I too did a thesis on robotics, specifically on path planning of multiple industrial robots. If you are interested, you can check it out here: etd.ohiolink.edu/acprod/odb_etd/etd/r/1501/10?clear=10&p10_accession_num=dayton1701617256204635
Love your explaination! Shows how much you yourself love this subject!
Please keep them coming!
Thank You
Thanks a lot, Yousaf. I do love robotics to the core.
I definitely will be sticking to my schedule of making at least one video every week.
Robotics enthusiast here, plzzzzz do continue with the series
Excited to have you here. I definitely will. Until the next video, try catching up on the previous videos in this series. I guess I have already made 10+
Nice explanation.
Loved it ☺️
Thanks a lot, Mohit. I hope you continue following this robotics 101 series.
Hi, Thanks for explaining well. I read some textbooks where for jacobian matrices will produce a 6xn matrix, where n is the number of DOF. What is the difference with the 3x3 matrix you described?
The 3x3 matrix that I talk about is for a planar robot. It is quite intuitive since if you think about a planar robot holding something with its end-effector then it can only move it in X and Y direction and rotate it in the plane. It generally has a 3DOF. The linear velocity is therefore just Xdot and Ydot and the angular velocity is w about the x-axis (out of the plane).
For a spatial robot holding something, it can move the object in X, Y and Z directions and rotate it in three different ways (roll, pitch, yaw). Therefore the linear velocity is comprised of Xdot, Ydot, and Zdot and the angular velocity also has three components (one about each axis-X, Y, Z). Hence, generally, a spatial robot with a 6 DOF has a 6x6 Jacobian matrix. If you take away its ability to move in one direction, then the Jacobian matrix's one column corresponding to that particular motion disappears and it becomes 6x5, and so on.
Hope it makes sense.
@@EngineeringSimplified I'm trying to find jacobian for the articulated manipulator and get the angular velocity results -cos and sin on the matrix. But I find this strange, how can angular velocity produce a function of cos and sin instead of 1 or 0. but this is also the same result when I read some journals. Are my results correct or not?
@@AbdulRahman-jz3px If I understand you correctly, the Homogeneous transformation matrix that you get has cos and sin terms (4 terms for a planar case & 9 terms for the spatial case). To find angular velocities, you take the derivative of 'x' in the sin(x) and cos(x) terms. This is because the 'x' represents the angle of rotation and to find the angular velocity, you differentiate the angular displacement with respect to time.
Hope it makes sense.
thank you than you thank you
You're welcome!
Can you please explain how the 3×1 matrix L1,theta and L3 have come in the second example
I
The Jacobian matrix relates the joint space to the end-effector space. In the previous example, we only had angles as joint parameters so the 3x1 matrix only had thetadots. Now, we have both prismatic joints and revolute joints so the 3x1 matrix will need to have both the thetadots(s) corresponding to revolute joints and Ldot(s) corresponding to the prismatic joint(s).
Does that make sense?
how did we differentiate x and y . In terms of what because i see 'L'
'L' is the link length which is just a constant so you differentiate it just like you would for any constant.
You sound a little down, hope youre doing fine
I am all good, thanks for the concern.