A possible reason for the discrepancy is that he used negative angles for the rotation, which changed the sign of sin(θ) in the diagonal elements compared to other rotation matrices.
Hi, I believe the pitch rotation (about the y-axis) may be illustrated incorrectly. A positive pitch rotation should rotate a vector downwards. I.e., a rotation of pi/2 will rotate a vector pointing straight forward [1,0,0] to straight down [0,0,-1].
I'm pretty sure for the first diagram (with the hand), he has the wrong direction of rotations for x and z-axes. As far as i'm aware, a positve angle is measured in the anti-clockwise direction from the perspective of the origin i.e. if you were looking along the axies from the origin.
@Chucho haha yep I know the feeling! We'll get there eventually. Good luck to you mate. I'll let you know if I find a promising explanation I'm confident about 👍🏽
The arrow for the y rotation is wrong, the direction of the rotation should always follow the positive right-hand convention (counterclockwise if seen from above the rotation axis), so the arrow in the diagram should be reversed. The corresponding matrix is correct.
@@lucadavidian5441 Yeah, I also agree the arrow for y rotation is wrong, or we could say the rotation matrix for y axis is wrong, they don't match. If I don't change the arrow, I switch the position of sin(θ) and -sin(θ), they could also match.
How do we calculate a second rotation? For example, after a body pitches 45 degrees, it yaws 45 degrees about its body frame? It would be incorrect to multiply its nose vector, say by R(y=45 deg) * R(z = 45 deg), since the second matrix that you would be multiplying by is in the inertial (unrotated) frame.
Hi Mariah, I believe this is a mistake! Thanks for catching this. The matrix should be: [ cos(a) 0 -sin(a) ] Ry(a) = [ 0 1 0 ] [ sin(a) 0 1 ] I'm working on a while new series of videos so if you see any other errors, or have any other things you have questions about please let me know!
@@Woolfrey Thank you for replying to my comments. The reason I'm asking because I try to look up other resources online and they all showed what you had for the Ry matrix - which is different in signs as compared to the Rx and Rz (i.e what you had on the videos was consistent with online resources that I looked up). Would you mind double checking on this? thank you so much!
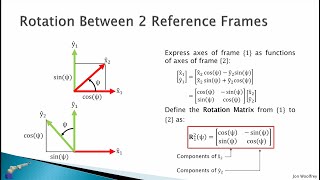
Rotation of 90degrees of i unit vector around y axis should produce a k unit vector, which will be achieved if the first column of matrix contains cos, 0, sin (cos 90 being zero makes the x coordinate zero). Rotation of 90 degrees about y axis of k unit vector should produce a negative i unit vector, which will be achieved when the third column contains: -sin, 0, cos (sin 90 being 1 makes x coordinate -1 from zero). Correct transformation matrix: (Cos, 0, -sin) (x) (x') ( 0 ,1, 0 ) (y) = (y') (Sin, 0, cos) (z) (z')
@@mariaph9700 Hi.. you are right about the sign being different in case of y as compared x and z. This stems from the fact that these are not improper transformations (mirror image) and that these are based on the right-handed coordinate system.
I saw this too and even calculated it out. I think its supposed to be the transpose of whats given. Having the vectors be row vectors rather than column vectors.
Can you help me with an exercise please 😭🙏🏻🙏🏻 I've been struggling for 2 days with just having to give the homogeneous transformation matrix Thank you very much in advance 🌻 It’s a graded practical exercise 🙏🏻🙏🏻😭
My problem is that in real life the order of rotation doesn't matter and that's what I'm trying to replicate, the issue is how can I rotate the player camera to where it acts like real head movement.
What are the unit vectors of a surface (say a cube ) when a surface is rotated by some angle.... Can you make a video on that.... It would be very helpful to me
First of all I would like to thank you for your very informative video. But I am having trouble solving a problem: Let's imagine those two frames (nx, ny, nz) and (bx, by, bz) as you have illustrated. Where after a rotation (or series of rotations) the projection of bz with respect to (nx, ny, nz) KNOWN (that is r13, r23, r33). How can we determine from this, the rotation angles (Yaw, Pitch and Roll) around (nz, ny, nx) respectively which leaded to (bx, by, bz)? THANK YOU IN ADVANCE
Hello I stuck in a geometric problem can you help me . Let there is two point in free space and we have to draw a cube at the mid point of these two point such that cube is aligned to line created by these two point.
A bit late, but do you mean with "(...)such that cube is aligned to line created by these two point" that these points land on two of the cubes corners? If yes then we can build a cube with point 1 at the center of half the length between point 1 and 2 and the apply half a vektor from point 1 to 2 with scalar 0,5. we can get the length of the cube through pythagoras formula c² = a² + b² where c is the distance from the middle to one of the corner which means a is half the height of the cube and b is the diameter of a 2D projection ( a square). of said square the length must be equal to the length to the cube so the same formula where c is now our old b and both a and be must be our old a so c² = a² + (2a²) so a is equal to the square root of half the length between point 1 and 2 minus the squareroot of 3. that's my attempt I'm probably terribly wrong though.
This is not true. If you rotate a 3D vector using quaternions you're essentially applying an SO(3) transformation. And if you want to visualise a 3D co-ordinate frame you need the SO(3) rotation matrix. I'm working on a new series of videos which will cover quaternions, but it is quite long. Rotation matrices are an easy and intuitive starting point for teaching the concept of rotation.
@@Woolfrey I said useless because any rotation library for real applications is based on quaternions. And quaternions are the even subalgebra of a left hand side frame ... We are still using Hamilton's finding
@@AndreaCalaon73 I've written my own robot control libraries which uses quaternions. As I said before, rotating a 3D vector reduces to using an SO(3) matrix. The columns of the SO(3) matrix also give you the unit vectors of a relative co-ordinate frame, and it's very common to plot these in Robot Operating System (ROS).
@@Woolfrey A rotation is actually a double reflection, in any number of dimensions. ruclips.net/video/iwQlrgAduMg/видео.html We can use matrices and their product, but Geometric Algebra makes it clear the double reflection nature. I don't know robots, but satellites and computer graphics cannot risk locking. I am not an expert, but I used quaternion libraries, when I was younger




![[DOKKAN BATTLE] Worldwide Campaign Announcement Video Part 2!](http://i.ytimg.com/vi/JpT5Voak6WA/mqdefault.jpg)



The rotation direction of y axis is wrongly shown. It shouldn't be clockvise in this view. I think this may lead to confusion.
You are correct. It's an old mistake!
A possible reason for the discrepancy is that he used negative angles for the rotation, which changed the sign of sin(θ) in the diagonal elements compared to other rotation matrices.
Thank you! You saved my life with that explanation 😭 I have exams in a week, wish me luck!
Did you pass?
@@vitaliitomas8121 hope so. he passed and forgot to comment. if he failed, he would have come back and watched this video again.
Hi, I believe the pitch rotation (about the y-axis) may be illustrated incorrectly. A positive pitch rotation should rotate a vector downwards. I.e., a rotation of pi/2 will rotate a vector pointing straight forward [1,0,0] to straight down [0,0,-1].
Why is the positive theta angle for the y axis not in the same direction as the x or z axis (following the right hand rule)
I'm pretty sure for the first diagram (with the hand), he has the wrong direction of rotations for x and z-axes.
As far as i'm aware, a positve angle is measured in the anti-clockwise direction from the perspective of the origin i.e. if you were looking along the axies from the origin.
@Chucho haha yep I know the feeling! We'll get there eventually.
Good luck to you mate.
I'll let you know if I find a promising explanation I'm confident about 👍🏽
The arrow for the y rotation is wrong, the direction of the rotation should always follow the positive right-hand convention (counterclockwise if seen from above the rotation axis), so the arrow in the diagram should be reversed. The corresponding matrix is correct.
@@lucadavidian5441 Yeah, I also agree the arrow for y rotation is wrong, or we could say the rotation matrix for y axis is wrong, they don't match. If I don't change the arrow, I switch the position of sin(θ) and -sin(θ), they could also match.
2.39 i am confused about the direction of rotatiin. Should not they be in opposite direction at x and y axis?
one of the best explanations.
That was really helpful. Thank u sir simple and clear. Thanks u 🙏
you positive y rotation vector is wrong. It is the other way. You are showing a negative pitch. Keep you thumb along positive y axis.
How do we calculate a second rotation? For example, after a body pitches 45 degrees, it yaws 45 degrees about its body frame? It would be incorrect to multiply its nose vector, say by R(y=45 deg) * R(z = 45 deg), since the second matrix that you would be multiplying by is in the inertial (unrotated) frame.
Good video .How I could substitute Phi =2tan(R23,R33)as function of number elements please & extracting 'Jacobian Matercis' from rotation matrix.
In illustration 2:30 to 3:15, the direction of rotation is wrong for the y-axis :)
Excellent video!
Thank you! It was helpful
At minute 7:01, you're showing how to extract the angles from the matrix, but using Z,Y,X orientation right?
Is there any geometric/visual way of seeing why every rotation is a composition of two rotations.
At 2:55, would you mind explaining why there is a difference in sign of rotation matrices of x,z with y?
Hi Mariah, I believe this is a mistake! Thanks for catching this. The matrix should be:
[ cos(a) 0 -sin(a) ]
Ry(a) = [ 0 1 0 ]
[ sin(a) 0 1 ]
I'm working on a while new series of videos so if you see any other errors, or have any other things you have questions about please let me know!
@@Woolfrey Thank you for replying to my comments. The reason I'm asking because I try to look up other resources online and they all showed what you had for the Ry matrix - which is different in signs as compared to the Rx and Rz (i.e what you had on the videos was consistent with online resources that I looked up). Would you mind double checking on this? thank you so much!
Rotation of 90degrees of i unit vector around y axis should produce a k unit vector, which will be achieved if the first column of matrix contains cos, 0, sin (cos 90 being zero makes the x coordinate zero).
Rotation of 90 degrees about y axis of k unit vector should produce a negative i unit vector, which will be achieved when the third column contains: -sin, 0, cos (sin 90 being 1 makes x coordinate -1 from zero).
Correct transformation matrix:
(Cos, 0, -sin) (x) (x')
( 0 ,1, 0 ) (y) = (y')
(Sin, 0, cos) (z) (z')
@@mariaph9700 Hi.. you are right about the sign being different in case of y as compared x and z. This stems from the fact that these are not improper transformations (mirror image) and that these are based on the right-handed coordinate system.
@@Woolfrey The mistake is not in the sign, it is in the direction of rotation you are taking according to the "standard" mathematics.
Is counterclockwise direction of rotation arbitrary?
Thanks
using matrix find the transformation equation for a 90° degree rotation about the z axis of cartesian coordinate system
I have doubt ,Can you please explain how 0 .97 was came , in your example problem.
It seems R(z) is a rotation clockwise instead of conterclockwise. Is that correct?
I saw this too and even calculated it out. I think its supposed to be the transpose of whats given. Having the vectors be row vectors rather than column vectors.
[2:51] rotation on Y is incorrect, should be ccw
Good for programming 3D things.
Can you help me with an exercise please 😭🙏🏻🙏🏻 I've been struggling for 2 days with just having to give the homogeneous transformation matrix Thank you very much in advance 🌻 It’s a graded practical exercise 🙏🏻🙏🏻😭
Very interessant
very good.
Amazing
My problem is that in real life the order of rotation doesn't matter and that's what I'm trying to replicate, the issue is how can I rotate the player camera to where it acts like real head movement.
Very helpful thanks
What are the unit vectors of a surface (say a cube ) when a surface is rotated by some angle.... Can you make a video on that.... It would be very helpful to me
You take the vector perpendicular to that surface and rotate it.. no?
Thank you!
Is rotation matrix in clockwise and counterclockwise sense about any axis is same ,if no then what is it
your sinuses in matrix will change sign, cosines remain the same
First of all I would like to thank you for your very informative video.
But I am having trouble solving a problem:
Let's imagine those two frames (nx, ny, nz) and (bx, by, bz) as you have illustrated. Where after a rotation (or series of rotations) the projection of bz with respect to (nx, ny, nz) KNOWN (that is r13, r23, r33). How can we determine from this, the rotation angles (Yaw, Pitch and Roll) around (nz, ny, nx) respectively which leaded to (bx, by, bz)? THANK YOU IN ADVANCE
find the transformation equation for a 90° rotation about the z axis
مشكور خوي ❤✌🇱🇾
Good
Thank You!!!
I have been following the other videos but this one confused the heck out of me.
Thanks for the feedback. I plan on redoing these some day, if I can ever find the time...!
Can anyone tell me the rotation matrix for sphere?
Thx
Hello I stuck in a geometric problem can you help me .
Let there is two point in free space and we have to draw a cube at the mid point of these two point such that cube is aligned to line created by these two point.
A bit late, but do you mean with "(...)such that cube is aligned to line created by these two point" that these points land on two of the cubes corners? If yes then we can build a cube with point 1 at the center of half the length between point 1 and 2 and the apply half a vektor from point 1 to 2 with scalar 0,5. we can get the length of the cube through pythagoras formula c² = a² + b² where c is the distance from the middle to one of the corner which means a is half the height of the cube and b is the diameter of a 2D projection ( a square). of said square the length must be equal to the length to the cube so the same formula where c is now our old b and both a and be must be our old a so c² = a² + (2a²) so a is equal to the square root of half the length between point 1 and 2 minus the squareroot of 3.
that's my attempt I'm probably terribly wrong though.
My hw is to solve rotation matrix in four dimension is that possible?
Of course! You could do a rotation matrix in 1000 dimensions if you wanted. I'm not 100% certain where to start for 4D though... 🤔
God bless woolfrey 🙏
cool!!!
Good content please work on a good sound next time.
Please can you Download this lecture
There are lots of free RUclips downloaders on the internet!
Osm....
The matrix "is _given_ by..." 😏
Thank....m frm india.....#munmunbaro...
Australia never existed?!
Where are quaternions? All real rotation in 3d are made through quaternions. The systems shown are usless
This is not true. If you rotate a 3D vector using quaternions you're essentially applying an SO(3) transformation. And if you want to visualise a 3D co-ordinate frame you need the SO(3) rotation matrix.
I'm working on a new series of videos which will cover quaternions, but it is quite long. Rotation matrices are an easy and intuitive starting point for teaching the concept of rotation.
@@Woolfrey For visualization the double reflection of Geometric Algebra is not ok?
@@Woolfrey I said useless because any rotation library for real applications is based on quaternions. And quaternions are the even subalgebra of a left hand side frame ... We are still using Hamilton's finding
@@AndreaCalaon73 I've written my own robot control libraries which uses quaternions. As I said before, rotating a 3D vector reduces to using an SO(3) matrix. The columns of the SO(3) matrix also give you the unit vectors of a relative co-ordinate frame, and it's very common to plot these in Robot Operating System (ROS).
@@Woolfrey A rotation is actually a double reflection, in any number of dimensions.
ruclips.net/video/iwQlrgAduMg/видео.html
We can use matrices and their product, but Geometric Algebra makes it clear the double reflection nature. I don't know robots, but satellites and computer graphics cannot risk locking. I am not an expert, but I used quaternion libraries, when I was younger
Good