An efficient strategy for optimizing a neuro-fuzzy controller for mobile robot navigation
US
Войти
Making robot navigation easy with Nav2 and ROS!
22:39
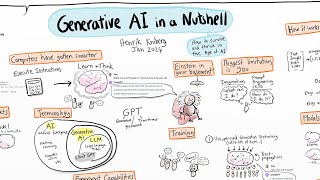
Generative AI in a Nutshell - how to survive and thrive in the age of AI
17:57
Kyiv proposes terms to Moscow / Conditions for negotiations
15:01
Ilona Maher’s Finale Freestyle - Dancing with the Stars
02:10
Watching a Rocket Launch at SpaceX with Elon Musk!
11:40
The UPDATED GOATMAN mod is EVIL.. Minecraft: From the Fog
58:08
An efficient strategy for optimizing a neuro-fuzzy controller for mobile robot navigation
IAES Institute of Advanced Engineering and Science
Подписаться
89
Скачать
Готовим ссылку...
Просмотров 81
0
0
Добавить в
Мой плейлист
Посмотреть позже
Поделиться
Поделиться
HTML-код
Размер видео:
1280 X 720
853 X 480
640 X 360
Показать панель управления
Автовоспроизведение
Автоповтор
Опубликовано: 27 ноя 2024
Комментарии •
Следующие
Автовоспроизведение
22:39
Making robot navigation easy with Nav2 and ROS!
Articulated Robotics
Просмотров 103 тыс.
17:57
Generative AI in a Nutshell - how to survive and thrive in the age of AI
Henrik Kniberg
Просмотров 2,3 млн
15:01
Kyiv proposes terms to Moscow / Conditions for negotiations
NEXTA Live
Просмотров 474 тыс.
02:10
Ilona Maher’s Finale Freestyle - Dancing with the Stars
Dancing With The Stars
Просмотров 266 тыс.
11:40
Watching a Rocket Launch at SpaceX with Elon Musk!
Kai Trump
Просмотров 2,5 млн
58:08
The UPDATED GOATMAN mod is EVIL.. Minecraft: From the Fog
Calvin
Просмотров 300 тыс.
01:09
The Chosen: Last Supper Teaser (Season 5)
The Chosen
Просмотров 915 тыс.
25:48
What do tech pioneers think about the AI revolution? - BBC World Service
BBC World Service
Просмотров 900 тыс.
10:29
Что будет с рублем и экономикой России? Доллар и евро бьют рекорды
Телеканал Дождь
Просмотров 83 тыс.
12:29
What are AI Agents?
IBM Technology
Просмотров 711 тыс.
27:14
Transformers (how LLMs work) explained visually | DL5
3Blue1Brown
Просмотров 3,8 млн
25:47
Easy SLAM with ROS using slam_toolbox
Articulated Robotics
Просмотров 148 тыс.
4:02
Ливерпуль - Реал Мадрид | Лига чемпионов. Обзор матча 5 тура
Okko Спорт
Просмотров 421 тыс.
30:05
The AI Tsunami is Here: Keynote on Why Firms Must Act Now
Center for Digital Transformation | CDT
Просмотров 59 тыс.
12:22
Рубль обрушился. Доллар по 115. Набиуллина против Чемезова. Новости экономики от Дениса Касянчука
Ходорковский LIVE
Просмотров 129 тыс.
20:18
Why Does Diffusion Work Better than Auto-Regression?
Algorithmic Simplicity
Просмотров 381 тыс.
45:19
ПОПОЛНЕНИЕ В СЕМЬЕ,ПОДАРОК ЖЕНЕ,ПОДАРОК ИЛЮХЕ,ЛУЧШИЙ ГОД ДЛЯ МЕНЯ♥️
Большегруз 40rus
Просмотров 128 тыс.
22:17
НАТО Готовит Точечные Удары💥Наступления ВС РФ Ускоряется🔥Военные Сводки И Анализ За 26.11.2024
Военные Сводки
Просмотров 799 тыс.
00:40
Truque de desenho que realmente funciona! 😂
Vida Luminosa
Просмотров 3,6 млн
22:51
Выживаю в КИТАЕ на 1$ ! День 1
A4
Просмотров 1,3 млн
00:17
Moment Georgia's election chief is doused in PAINT
Daily Mail
Просмотров 1,7 млн
15:47
Продвижение В Великой Новоселке⚔️Отступление С Купянска⚠️Штурм Свердликово💥Военные Сводки 27.11.2024
Военные Сводки
Просмотров 524 тыс.
00:16
Ответ на комментарии 🙂 #развитие #семейныйблог
Наш ДАНЯ
Просмотров 240 тыс.
28:49
НУБ И ПРО ПРОВЕРЯЮТ СЕКРЕТНЫЕ БАГИ МАЙНКРАФТ ! НУБИК И ТРОЛЛИНГ ЛОВУШКА В MINECRAFT
DakPlay
Просмотров 438 тыс.