Размер видео: 1280 X 720853 X 480640 X 360
Показать панель управления
Автовоспроизведение
Автоповтор
god level playlist
For real
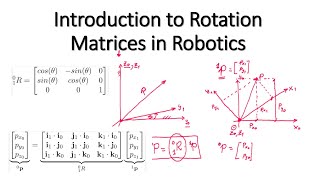
Euler representation x'y'z' angles are gamma, beta, alpha. Shouldnt the angles be other way round; alpha, gamma, beta?
You are a legend
This is brilliant. Thank you!
Should the last slide be R_xyz_fixed = R_zyx_euler?
is alpha, beta, gamma correct for both?
Can you please explain the derivation of the calculations...
Nice video
Nice video but what's with the bass boosted intro 🤣🤣
What is the physical use of this representations
I think it's used for graphics, to see how objects are "rotated" only not transformed!
Thank You Sir
Hi sir. Can I have your email so that I can explain details my questions?






![SahBabii - Viking [Official Music Video]](http://i.ytimg.com/vi/D37cL92JX0I/mqdefault.jpg)

god level playlist
For real
Euler representation x'y'z' angles are gamma, beta, alpha. Shouldnt the angles be other way round; alpha, gamma, beta?
You are a legend
This is brilliant. Thank you!
Should the last slide be R_xyz_fixed = R_zyx_euler?
is alpha, beta, gamma correct for both?
Can you please explain the derivation of the calculations...
Nice video
Nice video but what's with the bass boosted intro 🤣🤣
What is the physical use of this representations
I think it's used for graphics, to see how objects are "rotated" only not transformed!
Thank You Sir
Hi sir. Can I have your email so that I can explain details my questions?