Hmm, if motor/arm A is on the right, if I tilt it Y-wise up (CCW), I will limit range of B arm even more, not sure if I understand your suggestion (I have a small model in my hand trying). The 30.15.6 notion in the title refers to radius, the 35.x.x (or higher) version gives more freedom, the 30.x.x version is most compact (shorter arms = less flimsy).
@@Gotchau No problem, the mechanics looks simple, but it's not easy to comprehend all the motions possible, so I appreciate you made the suggestion, it makes me keep thinking of more possibilities. See twitter.com/XYZdims/status/1430765489551200258 for all the sizes I looked at (50% I actually made).
Very cool! Don't forget to account for the foreshortening of the slave linkage arm as its angle changes when you build your kinematics. It's one of those subtle things that would drive you nuts in troubleshooting!
"Foreshortening the slave linkage arm as its angle changes when you build your kinematics" - sorry, please explain more detailed. Left motor is A (Xrot), and motor B (Yrot), and Yrot has two links (Yrotl1 at the motor & Yrotl2 connecting to the disk with the hotend). What is "foreshortening" in this context? Did you look at ruclips.net/video/I1CILK-h0UM/видео.html ?
@@ReneKMueller Yrot2 in your model is a rotary element, complicating the kinematics beyond simply having the hotend follow Xrot and Yrot in a "latitude-longitude" polar format. That is, if you go 45° on both axes, the resultant angle will not be {45,45} but will be foreshortened by the difference between a theoretical slotted mechanism and this rotary linkage. Unfortunately, while I remember the concepts it's been ~20 years since I had to work out polar transformation matrices.
@@Traqr Understood, I'm currently doing the kinematics to support G-code A(Zrot) and B(Xrot), and calculate required Xrot and Yrot of motors A & B - the sub-system of Xrot/Yrot has its own entanglement, as both motors want to operate mathematically independent but mechanical does not. So, yes, it's not as simple as it looks like.
Happy Anniversary, Rene. Is there a way to reach you to discuss a couple of your projects. I've been working on something unrelated, but the concepts overlap. Yurt work is amazing 👍
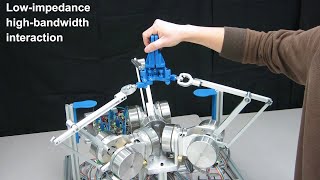
It's an early prototype, it relates to 5-axis printheads I work on, see my site xyzdims.com which shows non-planar slicing methods, I mix those (segmenting sub-volumes), in order to print those I need 5-axis.

![[1337] My New & Improved Robotic Safe-Cracker…](http://i.ytimg.com/vi/vkk-2QEUvuk/mqdefault.jpg)
![[1337] My New & Improved Robotic Safe-Cracker…](/img/tr.png)






I think placing the nozzle at the origin of rotation would make it a lot easier and also more satisfying to watch.
This is awesome!
Awesome!! 😊
Hi will you be releasing files / a tutorial on how to design a Spherical Parallel Manipulator? many thanks!!
+1 for the request
Great work! This is awesome!
Great video.
Well done!
What if rotate the entire structure so that each motor is at an angle of 45 degrees to the vertical. This should leave more room for maneuver.
Hmm, if motor/arm A is on the right, if I tilt it Y-wise up (CCW), I will limit range of B arm even more, not sure if I understand your suggestion (I have a small model in my hand trying). The 30.15.6 notion in the title refers to radius, the 35.x.x (or higher) version gives more freedom, the 30.x.x version is most compact (shorter arms = less flimsy).
@@ReneKMueller Perhaps I was too hasty to write this comment. I need to make a 3D model and double-check it.
@@Gotchau No problem, the mechanics looks simple, but it's not easy to comprehend all the motions possible, so I appreciate you made the suggestion, it makes me keep thinking of more possibilities. See twitter.com/XYZdims/status/1430765489551200258 for all the sizes I looked at (50% I actually made).
Very cool!
Don't forget to account for the foreshortening of the slave linkage arm as its angle changes when you build your kinematics. It's one of those subtle things that would drive you nuts in troubleshooting!
"Foreshortening the slave linkage arm as its angle changes when you build your kinematics" - sorry, please explain more detailed. Left motor is A (Xrot), and motor B (Yrot), and Yrot has two links (Yrotl1 at the motor & Yrotl2 connecting to the disk with the hotend). What is "foreshortening" in this context? Did you look at ruclips.net/video/I1CILK-h0UM/видео.html ?
@@ReneKMueller Yrot2 in your model is a rotary element, complicating the kinematics beyond simply having the hotend follow Xrot and Yrot in a "latitude-longitude" polar format. That is, if you go 45° on both axes, the resultant angle will not be {45,45} but will be foreshortened by the difference between a theoretical slotted mechanism and this rotary linkage. Unfortunately, while I remember the concepts it's been ~20 years since I had to work out polar transformation matrices.
... Just watched the inverse kinematics video - looks like you've got it covered!
@@Traqr Understood, I'm currently doing the kinematics to support G-code A(Zrot) and B(Xrot), and calculate required Xrot and Yrot of motors A & B - the sub-system of Xrot/Yrot has its own entanglement, as both motors want to operate mathematically independent but mechanical does not. So, yes, it's not as simple as it looks like.
@@ReneKMueller this all makes no sense to me sadly but I respect what you doing and would love to learn, hopefully one day 👍
OOH !!!!!
Happy Anniversary, Rene. Is there a way to reach you to discuss a couple of your projects. I've been working on something unrelated, but the concepts overlap. Yurt work is amazing 👍
Contact at xyzdims.com
What are the benefits of this over the 4-axis version?
Do you have a file to print? can send me?
Can you send me a code for it?
Any discussion threads related to this?
How will you generate toolpaths?
It's an early prototype, it relates to 5-axis printheads I work on, see my site xyzdims.com which shows non-planar slicing methods, I mix those (segmenting sub-volumes), in order to print those I need 5-axis.