Backdrivable Kinematically Redundant (6+3)-DOF Hybrid Parallel Robot -Part 2:Human-Robot Interaction

HTML-код
- Опубликовано: 7 сен 2020
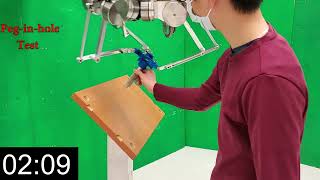
- This video demonstrates the operation of a novel kinematically redundant (6+3)-dof spatial hybrid parallel robot in a context of physical human-robot interaction. Human intention is detected without using any other sensor than the motor encoders thanks to the backdrivability. The user freely moves and guides the robot to any configuration in its workspace. The demonstration of virtual walls shows the potential of using this robot in haptics applications. Finally, a user can very intuitively teach the robot some target points for pick-and-place tasks.
Links to related research articles :
- The robot design and analysis (ICRA-2019) : ieeexplore.ieee.org/document/...
- The forward kinematic analysis (Journal of Mechanisms Robotics-2020) : asmedigitalcollection.asme.or...
- The robot analysis and control strategy for applications in pHRI: (TRO-2020 Under Review)
Link to related video:
- Trajectory control : • Backdrivable Kinematic...  Наука
Наука








the gripping mechanism is WOW!!
Really interesting, thanks for sharing!
Wow, this is incredible tech, I can't wait to see what you do with it going forward. Greetings from Newfoundland. 😊
Coolest thing I've seen today on RUclips. I'm curious of the gripping force.
Superbe ,bravo !
WOW! This is insane! 😳
masterpiece !
Question: Could it be used as a haptic joystick in an dual setup for both hands to steer a skyscraper sized robot?
Incredible! What EtherCAT master do you use?
incredible engineering; this one the nano scale would change everything
Impossible on the nano scale
Good for a replicator especially if you build several of them as they could still work even if lots of their parts become broken. They can even repair themselves.
Great protect , can you share?
How long did it take you to make this?
stock ticker ?
Nine stepper/servo motors?
Yeah, I was wondering the same. 9 Servos = 9 DOF. Each arm for itself has an endpoint positionable in X, Y and Z = 3 * 3 DOF, that works out.
But when everything is connected with that gripper I am missing one DOF in my counting: X, Y, Z, rotation on X, rotation on Y, rotation on Z, distance of left yaw to center-point, distance of right yaw to center-point = 8 DOF. Maybe a three yaw design was intended. The mechanics at the bottom of the gripper look like it.
what type of motor? thx
Maxon EC 90 Flat motor
흠터레스팅..
nine??????