Это видео недоступно.
Сожалеем об этом.
player/stage robot mapping/exploration

HTML-код
- Опубликовано: 17 авг 2024
- Source code is available here: github.com/sun...
It now supports Vagrant, so "vagrant up" and "vagrant ssh" should get you going.
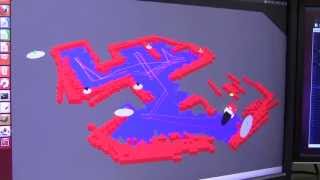
This is a player/stage setup of a robot with a noise-free laser rangefinder (0..4m) mapping a room without localization and pathfinding.
I was experimenting with a way to follow a wall while having a continuous motion by means of applying forces that pull and push the robot to and from walls. There is a P controller for the track speed, as well as some sort-of P controllers for the angular velocity. The latter ones react to direct and inverse proximity to obstacles and are used to avoid obstacles in the front by moving to the left, but also to steer the robot to the right when there is a void.
The map the robot creates encodes locations that have been seen in a green color. The color is stronger if a wall was seen in the given direction. This information, however, is not used in the demonstrated implementation.








Hello very success , my üniversty project is autonom mapping cleaning robot. can this system be adapted to it. Please help me.
Ricardo, I can't answer your comment directly because of RUclips, but there are multiple ways: You may want to invest in a SICK range sensor which is probably too expensive, try out the Parallax laser range finder which I find a bit limiting, try to find a Neato VX-11 laser module or simply go the IR distance measurement (e.g. VL6180, GP2Y0A21YK) / ultrasonic route. In most cases you will have to build the sweeping system yourself. Some people did a really good job with that: ruclips.net/video/nDkW_XuXQEM/видео.html
hi can we make this using arduino?
Hi Markus, I have a little question for you. Where did you learn to use Player/Stage? Because I don't find good tutorials.
Heya, sorry for the long delay. This was during an university course about autonomous robotics in Berlin. The source code above and a running version of Player/Stage (this really is the hardest part ...) should get you going. It's a relatively trivial configuration with no measurement noise and a hypothetical wide angle laser scanner, but maybe that's exactly the best way to start.
Hi, While running .cfg file I'm getting an error like :
error : Sorry, no support for shared libraries, so can't load plugins.
error : You should install libltdl, which is part of GNU libtool, then re-compile player.
error : failed to load plugin : stageplugin
error : failed to parse config file test. cfg driver blocks.
I'm getting this error even after installing libltdl.Please kindly help me, I'm trying from many days, but I didn't get any solution till now.
Thank you.
I'm using player -3. 0.2 and stage -3. 2.2
Hi Markus Mayer by starting up vagrant I get this error:
"
vm:
* The box 'sunside/playerstage' could not be found
"
can you help out?
i want to know wat type of software are used here, please.
Player and Stage for the simulation, and standard OpenCV HighGUI for drawing the state.
Hi dude, and if I want that a physical robot do exactly that, I don´t know from where to aproach the problem, but I need my robot to map exactly like that
Look up ros gmapping/hector mapping
Please give me the information about this robot's parts and whole hardware.
Here you go: www.volksbot.de/index-en.php
hi , please can you help me , I want to use RFID in player / stage but I could'nt, I find some difficulties, there are the RFIDPROXY in player but I did'nt know how to use it with stage .So please if you can help me to do this, i really Need help Thank you
Sadly I have no clue about that.
Markus Mayer
ok, thank you what about fiducial or blobfinder ? , i tried some code but it didn't work
Amel Ha Sadly not :)
hi , please can you help me ,
I want to use RFID in player / stage but I could'nt, I find some difficulties, there are the RFIDPROXY in player but I did'nt know how to use it with stage .So please if you can help me to do this, i really Need help
Thank you
Sadly I never used this. I'm afraid I can't help you here.
Ok thnx brother ;)
hi Markus, can you tell me what software you used to simulate this
Control and measurement is using the Player/Stage robotics framework, the autonomous mapping runs using OpenCV. Sources is available above. Sadly my comments there are in german, but the code should be readable.
Markus Mayer thanks Markus. now I want to create a robot but I don't know where to start. may you help me!
ngoc hai Tran phew ... are we talking physical or virtual robot? For physical ones the best start probably is to buy a 'complete' small one, be it Mindstorms or a dedicated one. I started with the Dagu Rover 5 chassis and worked on it for about four months; if you go lowlevel, you have to think about motor control, sensor fusion and the likes. Start higher - check robosavvy, robotgear etc., there may be interesting kits around; DFrobot MiniQ or something like that. As for programming on microcontrollers, start where you feel best. If you're totally new there, go Arduino. I started there and went from pure AVR on ATmega devices to ARM on Kinetis. That's quite a jump, in processing power as well in the magnitude of mindfucks.
If we're talking virtual, Player/Stage seems good, but is strange to configure. You can, after all, build a physical description of your robot there and program if fully on your PC, making it easier to find later decisions when going hardware. It's not as fulfilling though ... nothing is blinking.
Markus Mayer thanks Markus! I will start with simulation visual first. you can recomment me a software for window to do that.
ngoc hai Tran Heya, I updated the git project's README (this time in english) and added support for Vagrant (i.e. sweet + easy virtual machines); if you want to start with Player/Stage, you might want to have a look at the changes.
hi Markus Mayer, your video is very interesting ,please i want to know how you've done the mapping, i have installed the simulator player stage,but a don't know the code that i have to integrate ?
Heya, the source code is linked in the description. Maybe that'll get you started.
ok thank you, is that it works with multiple robots?
I followed your description, and I found an error in the installation of the virtual machine to make level
Markus Mayer
I did some modification, when I run the command player pstlab.cfg ,the window of the environment appears, but when I run the command ./simple localhost I get this error: bash: ./simple: No such file or directory
knowing that I installed Fluxbox, and when I go to http: // localhost: 6080 / vnc.html I can't connect without a password
Please I really need your help
Stupid question, but did you build the project using make?
Markus Mayer I followed everything you described except that I have this error when I run: player pstlab.cfg
** Stage plugin v3.2.2 **
* Part of the Player Project [playerstage.sourceforge.net]
* Copyright 2000-2009 Richard Vaughan, Brian Gerkey and contributors.
* Released under the GNU General Public License v2.
success
Stage plugin: 6665.simulation.0 is a Stage world
[Loading ./maps/pstlab.world]err: unable to open world file ./maps/pstlab.world : No such file or directory (/home/berroutic/pas/Stage-3.2.2-Source/libstage/worldfile.cc Load)
Stage plugin: 6665.position2d.0 is warn: lookup of model name volksbot0: no matching name (/home/berroutic/pas/Stage-3.2.2-Source/libstage/world.cc GetModel)
err: Error! can't find a Stage model named "volksbot0" (/home/berroutic/pas/Stage-3.2.2-Source/libstageplugin/p_driver.cc LocateModel)
ERROR! no model available for this device. Check your world and config files
Well, the map definitely file exists (check the maps directory). Did you run the code within the VM and from the /vagrant directory? I'm asking because the Vagrantfile sets up Stage 4.0.0, however your error message refers to Stage 3.2.2.
Markus Mayer
so ,i can't use the version Stage 3.2.2 ?
and did you used a SLAM algorithm?
can I use a group of robots so each robot mapping an environmental zone ?
I had troubles getting it to work with 3.2.2 myself back then, which is why I upgraded to 4. In general it should work though, not sure why it wouldn't find the map file. As for SLAM, I didn't implement that, however using particle-based localization (Monte Carlo/PFs) it should be „easy“ to implement. Multi agents, not sure about that. Should work, never tried it. That's likely to bring a bit of additional management overhead then in the source, but as I said, that's pure speculation. :)
What sensor was used for mapping?
It's a simulation; the sensor is configured as a LiDAR that does not produce any noise.
how to use this code??
You will need to have Player/Stage installed on your system - I followed an guide for Player/Stage on Ubuntu - and have OpenCV available. Then make it and follow the commands shown in the video.
Markus Mayer i installed the player stage in ubuntu 12.04 i tried to run your codes but its not working or im placing your code in wrong dir ??can u help!!
ajeet kumar gameti I now translated the README and added a Vagrantfile to the code that should get you going. You need to install Vagrant on your machine, clone the code and run "vagrant up" in the working directory. You'll end up with a fully configured VM. Hope that helps!
Markus Mayer
still getting problem i want to explore area with Astar and other algorithms
ajeet kumar gameti I'm not able to help you on that basis, I'm afraid. However I did find an error in the Vagrantfile, so maybe the problem is fixed now.