NCS - 40a - Backstepping Control - Basic Concept

HTML-код
- Опубликовано: 5 ноя 2024
- Basic concept of the back-stepping control for nonlinear systems is explained in this lecture.
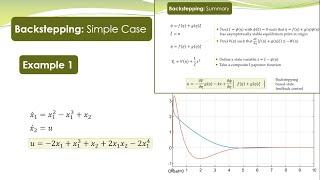
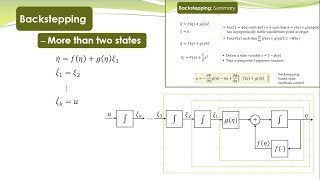
Backstepping is a very powerful technique for design of controllers for nonlinear systems. Systems with particular structure, called strict feedback systems, can be handled with this approach. This lecture explains the concept with a simple case when the system has only two states.







Thank you so much teacher 🙏
May god bless you
Thank you so much sir!
When xhi is equal to phi of eta...then how we define error both the difference
This case is described in Lecture 42 at the following link ruclips.net/video/V8BgAE2nw70/видео.html
Can you provide this slide? If you provide, it will be very helpful for me.
I shall share it on Monday.
Thank you @@MAFarooqi sir.. I also need Sliding Mode Control slides.If you provide, it will be very helpful for me.
The slides are shared at the following link
drive.google.com/drive/folders/1KlLqvsKJ8VALBHYEs3HZB_UuYcSvGJs2?usp=drive_link