Это видео недоступно.
Сожалеем об этом.
Autonomous Aerial Navigation in Confined Indoor Environments

HTML-код
- Опубликовано: 15 ноя 2010
- This video presents experimental results of autonomous navigation in confined indoor environments using an aerial robot.
The robot is equipped with an IMU, camera, and laser scanner with deflective mirrors. All computations are performed onboard using a 1.6GHz atom processor. The robot is able to navigate autonomously in indoor or outdoor, GPS-denied environments.
A SLAM module with vision based loop closure allows the robot to map large-scale, multi-floor environments.
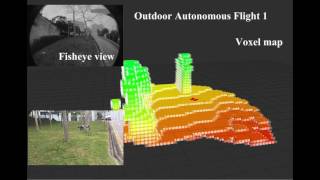
A sparse 3D map is generated on the robot based on sensor data, enabling high-level planning and visualization.
An RRT* based planner provides an anytime planning solution that fits the computational constraints of the robot. This planner also enables online re-planning and obstacle avoidance.
An LQR optimal controller with external force compensation enables reliable autonomous flight in highly constrained environments, such as hallways, doors, and windows. The robot is able to track the high-level plans accurately.








It runs a SLAM algorithm to estimate the pose of the drone as well as the map at the same time based on the measurement from the laser scanner and the IMU.
Skynet approves.
All computations are performed onboard? WOW! Even loop closure? I didn't realise an Atom processor was fast enough to process that kindof visual stuff on the fly.
very nice
Is there a paper somewhere I can read about this project? looks amazing.
did u find anything?
@@prashantranjan3175 no :/
R u still working on it?
I'm new to these things, would be happy to connect with u and work along
Absolutely fantastic. Great work!
Shaojie Shen, did you published a paper about this project?
I really wonder what type of camera and laser range scanner you used on your robot?
And of course which SLAM library you used. :-)
It would be neat to ad a function to this system called assumption mapping. The idea is to automatically apply a 3D wire grid with presumed surface planes to the map for future comparisons and faster mapping.
Starting with standard construction dimensions.
dude, amazing job, congrats!!!
Very impressive!
Is there a public research paper on this project available to read? Or if anybody made any implementations on this or similar to this and their work is open source I would appreciate it immensely if they comment a link to their work.
Wow, it's great
Hi Shaojie Shen
This look great. Tell how would one get there hands on a multirotor that can do all of this, I do aerial photography, and would like to branch out more and this looks like a great option.
Can you maybe give me an indication of pricing.
nice SLAM
Great work guys...
would this be able to be perfected to be then transferd into a program like sketchup and have textures appley to it such as the police crime scene cameras?
Is there any new development? Or available consumer or professional products of this technology available yet? Thinking about hobbiest interests, as well as professionally an indoor automated floorplan (real estate, safety, law enforcement/fire fighting/search and rescue/architectural review) etc.
This is great!
Quick question, how are you setting the mission goals? Is it randomly picked to be in unexplored areas, manually set?
How did it localize with IMU only? Don't you get a significant drift error? Did you double integrate the acceleration you got from IMU?
may I ask what SLAM technique did you use ? it looks like, you were driving the robot, so it was really pure SLAM, just localize yourself and build the map..... just any small description about the SLAM algorithm used would be great, thanks.
We click waypoints in the current map and the robot figure out how to fly to that place.
Is a knowledge base in openCV imperative for build a mapping device like the one you used in your video?
Fascinating how can we find an advertising application?
This is so amazing!
Think this is Amazing .. great work :)
How accurate is this measurement?
Sir. The Follow Comment is truly important:
YOUR DRONE MAY TO SAVE A LOT OF LIFES.
I am a Rescuer and my expertise is Collapsed Structure Search and Rescue.
For a many time We cannot to across inside the structures because are falling.
So is this point that a Drone may to be the eye and the measurement of the rescuer.
Please ANSWER this comment.
For rescue approaches see projects of the University of Zurich's Robot & Perception Group. This dynamic group under Prof. Davide Scaramuzza excelled in localization and identification of objects without GPS. Mainly by visual perception. Search the Research list with "Rescue" rpg.ifi.uzh.ch/publications.html
Thank you for your anwser. Can you make more contact with me? Really I need this knowledges.
Is is possible to get the source code for this project, I wanted to understand the algorithm implemented. Thanks!
we used onlly IMU based solution for positioning and navigating robot . Search "oblu controlled robot"
Hey, do you have any code to share? Need to develope semething similar!
Hello,
I'm a student doing a bachelor's degree graduation project based on the same idea. I am doing development on an ArduCopter hexa platform. My proposal is to extend the platform's current autopilot system with object collision detection and interior mapping, just as your UAV, but instead of using laser scanning I chose ultrasonic and infrared proximity sensors, combined with some image processing from the camera. Do you think this can work? Also any algorithms/articles you can suggest?
Hi Have you completed the project? Can you please share some details?
But, if you don't have any knowledge about the map, how do you "click waypoints"?
WOW!
wow, Im impresed
PROMETHEUS!
I am interested in contracting your services, what is your pricing?
1:45
similar
omg i want one
Why haven't google used this for google earth yet? Send out a few thousand drones to map the world in high detail 3d...
yeah. 3d mapping might be great but you can still get lost...
did you watch the video? you can the green points and then the bot going there??WTF
i believe not
But it is being controlled by a human the entire time...
What do you think "autonomous" means?
"Autonomous" = "acting independently or having the freedom to do so"
By being controlled by a human the entire time, it is not acting independently, nor is it proving that it has the freedom to do so. It still requires a pilot.
***** Watch closer, there is a Pilot driving it.
There is no pilot, there is a guy sitting behind a pc setting new goal states for the drone to move to. You see the red lines that pop up on the octomap every time a new goal is set, those are planned trajectories, you can also see the lines jumping around a bit when the drone is moving. So it's presumably running some kind of SLAM algorithm in parallel with it's trajectory planning. Which is even more reason to believe it's capable of fully autonomous mapping.
Summed up: It uses SLAM and is accurately removing any odometry drift, it's planning it's own trajectories and it's executing those trajectories autonomously all on the fly.
The only thing it doesn't have is an algorithm to set goal states which are used to calculate the trajectories, which is quite honestly a joke compared to what they already accomplished. And the goal states are nothing more than "i want you to be at this location with this orientation" command. To believe this drone is not capable of full autonomous mapping is honestly a mistake.
I even think the last mapping might have been fully autonomous.