Another Arduino project - Your Arduino Balancing Robot (YABR) - Part 1

HTML-код
- Опубликовано: 21 май 2017
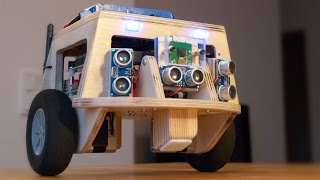
- In this video I build an Arduino balancing robot. The code that I use is self-written and is available from my website. A detailed built tutorial, drawings for the frame and electrical schematics can also be downloaded from my website:
www.brokking.net/yabr_main.html
If you have any questions please check the Q&A page first:
www.brokking.net/yabr_qanda.html
The code is explained in detail in the following videos:
Part 2: • Another Arduino projec...
Part 3: • Arduino project - Your...  Наука
Наука








When you click on the motor to view the item it takes you to a 42mm stepper motor. Should it be a 35mm
Is this wrong on your site??
Thank you for your comment. I checked the link and you are right, it's the wrong link. I corrected the link on my website and it has the correct link now. Thanks again!
Mark Greco do not place lipo on top, noob . lipo is heavier part in this project. it should be in bottom
osman özütemiz I will build it exactly as Joop has done the project
It is important for the battery to be on top for inertia
Osman, did you even watched the video? You need some inertia on the higher part of the robot to get it to work. Check this video on how to balance a stick on you finger: ruclips.net/video/lk_Pwu7nf1U/видео.html
Joop Brokking no, i dont know english im using translste
Joop i still didn't see in the net anybody with such complete and accurate informations/instructions as you. I deeply appreciate your effort and above all your passion. Many should learn from you.
I also want to say the thorough information you provide is great!
The bringup steps, checking for overcurrent, etc, are particularly good. These steps are important for any project but almost never discussed. Many folks that view this tutorial, even if they don't build the robot, will learn important concepts they can use on future projects.
Hà Nội của em
this is one of the first videos I actually see good wire management on the project
I had nothing to do with the project but the description and commentary is so nicely done, it's just perfect!!!
Thank you Joop, never seen such a perfect tutorial.
The language clear to understand, no music, and all details to download.
I just ordered the material and will try to reproduce this Robot.
I'm shure, I will learn a lot.
I can't understand those who gave a thumb dawn.
Kind regards
Otto
Thank you for writing me this comment. I really appreciate it!
i havent seen the next ep2 and ep3 videos, but i must say that your code and how you express your intruction in this ep1 is very very clear to understand, thank you for that
Excellent design and a great video!
Any time I see a video from you I know its going to be interesting as well as educational. I enjoy the simple, complete and interesting way you present your video info. (for anyone who does not understand the concepts/idea of a balance bot and how it works using an accel/gyro look back in Joop Brokking's videos for compete simple to understand videos, using his DIY arduino quadcopter as the platform)
Bit late to the party. Just made this Robot and must say what a well laid out and explained tutorial. I used 3D printed versions of the wooden bits. Had a bit of a problem with electromagnetic interference but tidying up the wiring and a couple of ferrite cores on the motor wires solved it.
Found this video from adafruit. You've got my subscription. Cant wait to check out the rest of your videos!
Your work is inspiring, accompanied by your descriptions!
Thanks so much! I've been looking for such a tutorial for such a long time!
A nice little project to play with,.. clearly explained ( unlike many ),.. with the potential pitfalls of what to look for,.. a definite thumbs up
Excellent video yet again, thank you so much! ☺
Thanks for the great tutorial! So concise, like a Swiss watch!
2 seconds in, I already know this is going to be awesome! 👍 :)
Thank you for the inspiration, think I will build something like this for my April project!
Great stuff I enjoyed your projects. Appreciate your effort. Its world class engineering.
This is great! Greetings from Germany!
Very well done. Excellent craftsmanship . I love your videos. Keep making more!!!!
I subscribed :)
Awesome! I'm working on exactly the same project! I'm using 12V steppers and an adafruit motorshield V2.3 to control them and an mpu6050. When I started the project I just chose stepper motors because I thought they looked cooler haha
Very cool project. Thanks for sharing your work!
there is nothing better than knowledge explained such that anyone can enjoy it
AMIGO VOCÊ ALÉM DE GÊNIO, É UM SHOW. VALEU POR COMPARTILHAR UM PROJETO COMO ESSE...PARABÉNS.
i have to say thank you for your amazing work i built this robot and worked perfectly thanks
Cool project! Thanks for sharing!
Very nice project you have here.
Everything is explained very good .
Good job ! Keep it up .
After I spend more than a month to gather all the stuff and to combine, finally I could build this robot.
Thanks for you very detail information. But there are some issue that I cannot upload when this arduino is in place... so I have to take out to upload every time.. Anyway I will figure out.
And you are right "limit current for step motor" is very important, I saw heated and smoke from diode before I limited current.
Thanks a lot!!!
Respect man, very nice project!
Very comprehensive , Thanks for teaching this subject , Nice presentation
Great Man! Thanks for posting video and plans.
Thanks for such nice and comprehensive tutorial Joop :)
Excellent @joop
Im going to design this balancing robot too in my lab..
In previous YMFC is working fine..
Keep on rocking..
Now im doing ARDUINO CNC.. Share that one soon..
awesome project and thanks for the explanations and detailed info , data etc.
Thanks for the video. I built a dual axis solar tracker, going to build this robot to learn the MPU9265 to aid in my tracking instead of LDRs (doesn't do very well in cloudy conditions)
You are awesome! thanks for posting this!
Excellent !!! Thank You for sharing your Knowledge !!!
Nice little project. This has lots of scope to be able to learn and replay movements..
You are an awesomely inspirational person thank you for your videos
Cool thing ;-)
I like the sound of the stepper motors :-)
Love this project!
Great work! Thanks for sharing.
Genius! Just simple, Genius!
Very Pleasent Tutorial & Video. Thanks for making my day.
Thank u so much Mr Joob for this perfect and accurate explanation, best regards
i love the sound it makes
Cool build! Sharing on The Awesomer.
Great Work, i am building this one, really nice. Thanks a lot
I'm so happy I subscribed to you 🙂
Amazing work Joop.
Hello Joop,
This project is awesome. Very much descriptive.
I would like to suggest you to make a video series on developing a micro quadcopter with serial transceiver(eg. HC-05) or nrf24l01+ with self made remote(transmitter) just like you made YMFC video series.
There is no such proper tutorial in youtube. I hope you would appreciate my suggestion and help enthusiasts just like you and me.
Oooh! I've been meaning to build something like this!
Beautiful project, thansks for share !!!!
great project! :) well done
very nice complete tut! Thank you.
Excellent brother!!!!!! Perfect
Thank you very much for this video and the instructions. I've just finished building my self balancing robot based on your instructions. A great project to learn more about these components, fun to build, and even better it works perfectly and is fun to use :-).
Thank you for sharing and great to hear that you learned something!
Hi Skyreacher. Congratulations on getting your robot project working.
I've been working on this project for about 4 months. I'm at the point where I've soldered the boards and I know that my DRV8825s work and are set to appropriate current for the motors. I'm able to drive the steppers via the 8825s on a separate arduino circuit, no problems.
However I'm finding some strange things on the main circuit. On Joop's diagram, resistors R2 and R3 are connected. Does this not effectively short out the purple and black and gray wires on the diagram? I get about a short between the gray and purple connections for the 8825s(lower right two pins) even when the 8825s are not on the board.The low voltage (5V) side of the circuits seem fine, but the high voltage side just goes to full power and the motors are frozen when the power is on. Can you confirm that the -ve side of the battery feeds BOTH the ground pins on the 8825s AND the GND pin on the step-down transformer that gives me the 5V supply for the components and around the low voltage sides of the circuit boards?.
I'm at the point where I'm thinking of starting again with the circuit soldering. Any insights you can offer are greatly appreciated. I'm really looking forward to completing this project as I'm on a robotics study group in my board of education in Ontario Canada, working to build our capacity in Arduino and robotics.
Hi Gordon! Search for "voltage divider" to understand what R2 and R3 are doing. This part of the circuit is completely OK, it does not create a short. The wire between R2 and R3 is connected to A0 on the Arduino - this is used for monitoring the battery. When the battery becomes weak, the robot will stop working without damaging the battery.
Yes, ground is the same on the whole circuit. All the black and light grey lines on Joop's diagram are connected. It sounds like there's a problem with your lower right two pins of the stepper driver (where high power is feed to them). If you test your circuit, there should be no connection between them. Having a short there can be dangerous for your battery! I'd not connect the battery at all, as long as the problem is there. Check your board very carefully, there must be a soldering problem somewhere (a connection between the purple and the light grey/black lines).
Really thanks for this project, I made this and works perfectly, really thanks for sharing, all of your projects are amazing, regards from Ecuador
Can you tell me which type of stepper motor (bipolar or unipolar) Joop have used?
hi sir may i ask about the rpoject?
Since you made all this code,it should be super easy to transform this project to a xy joystick controlled project. I think many will like this. Just remove the wireless, the accelerometer and the extra code. It will allow anyone to make a xy controlled project!
That is realy cool!! Thanks so much!!
All the hobbyists should take inspiration from your website. Quality bar set quite high
Absolutely awesome video, so if I wanted to make one twenty times the size, would the code have to be altered or not?
Nice and clear demonstrationen and the same for to the documentation as to what one need and how til assemble, much better than most others.
excellent project!
Great video. I am going to build one.
Keep up the good work.
Very cool project. I just bought an Arduino 101 which has a built-in 6-axis accelerometer, gyro and Bluetooth and may build one of these robots using it. I would like to try controlling it with my cell phone via a Bluetooth connection.
very nice! thanks for sharing. have a happy and prosper life
Cool bro. Responce is response but very cool robot!
Great Video ..very well explained.....as always......Thanks !!!
BTW....Stepper Motor`s are an excellent choose for this project
because of ...no backlash....in ballancing mode...
There are more benefits to the steppers - accurate (matching) speeds, direct speed command.
The DC motors are normally controlled by just duty cycle. This is not speed but rather power control. There is a dead zone at low duty cycle (no motion due to friction). As a result more stable ballancing position (I built first one with DC motors)
Great project! First the robot didn't work, but now it works. I had to wire the left motor with the right motor driver and the right motor with the left driver, then the balance worked. But why I must do this?
You are the best!
Congratulation, a really perfect Tutorial.
If every teacher would have your qualtity, the world would be much further.
Also verry good, no stupid music in the background as often.
So your words are verry clear to understand, also by non english mother tonge people.
Thank you
Otto
yeah! this is awesome! I wanna build it
Yessss
Nice work ;-)
Thank you for the great project! One question.. Can I use this platform to make autonomous robot with ultrasonic censor? Or it's impossible because of 4 milliseconds main loop limit? Thank you.
Interesting and Fully explained project. THanx for your efforts Joop Brokking. I can see that the post is old, so now: How about now using a Nano instead of Pro Mini together with 2x A4988, 2x JDY 40 2.4G (NRF24L01) and Stepper Motors +MPU6050. This would reduce the costs to less than 50% of what was in those years. Also the JDY-40 2.4G will not require a second Arduino (Uno in your case) for the remote (use simple 4 buttons sw for FF, RV, TL, TR all wired straight to the board ). this will make a tiny hand held RC operating with a small lipo. Loved your patience in Explaining in all the 3 video clips....I listened to them all.
nice project.👍👌 :)
Excellently explained... :-)
Great. Why put the Gyro in stand position instead of flat ? For giving plus and minus values from y pitch accelerometer ?
Wow, You are high on my inspiration list.
Looking forward to seeing projects!
I am converting your YABR PDF to a SVG for my CNC and looking forward to a build.
I see that you are using a water bath for cutting carbon fiber with your CNC. Have you tried it with plastics to cut down on dust in the belts and gears?
When you start milling your PCB's the water bath could be an auto leveler?
Your breadboard construction is very well done, nice attention to detail.
Thank You for sharing. I like your donation ethics too!
I never tried to cut plastic. So I have no experience with it. But it reduces carbon fiber dust so my best guess is that it will also work on plastic.
A4988 Driver. Just for information, you can use the A4988 Driver as a direct replacement for the DRV8825 in this robot. BUT you have to add a 5v VDD connection to it - that is next to the GND pin in the 'bottom left corner' (as per schematic PDF layout). Just jumper an extra wire from the 5v connections already going to it.
Yes you can
Nice projects. I want to ask you if I can use the accelerometer to read vibration in a ball bearing as I am working on a project mixed between mechanics and electronics...Thank you.
nice project
Very beautiful and good job
Hi Joop, any idea why the stepper motors work when not touching the ground, but halt and make a whirring noise when they do touch the ground? Everything else works well.
Very impressive :O
very nice build
Are there "performance loss with variable battery voltage" for brushless dc motors as well? or do brushless motors behave like stepper motors?
Thank you for the awesome videos, it has always fueled my interest in control engineering.:D
When I look at the photo of the prototyping PCB it looks like the FAULT pin is connected to the + 5V. Is this correct? I don't see in the schematic that pins 9 to 16 are all connected as it appears on the PCB. My fuses blow every time I plug in a DRV8825. With or without a stepper motor connected.
@Joop, for information, the schematic in pdf on the website, the FAULT pin is not connected. I started from this schematic purely and alone. After watching the video again, it appears that the schematic in this video used has been drawn correctly.
Hi, Joop: It's very interesting and you explained very well. I don't know if I missed while watching but the only thing I didn't clear after I saw you video is how the remote controller is connected. I know one of the transceivers is connected to the Arduino Uno. However, how is the one working with the remote controller is connected. I assume the Anduino's microcode will take care of their operations. If there's anything else, maybe I will ask next time.
Great project and great video - very open and easy to follow, thanks. How easy would you feel it is for a beginner to port this to MicroPython on a Pi Pico?
Hi Joop, before to start with building, I'm studing your code and video. I read the comment here. Why it is so important the exat position of the MPU-6050? Why it shouldn't work if I put MPU-6050 a little bit top or bottom, right, left? Thank you in advance. BR
Great video!! I was wondering how hard it would be to build an Arduino based 3 axis brushless gimbal?
Hi Joop! Thank you for your video. Why did you use 1/4 step mode instead of 1/16? Was it because of torque or to increase the time step?
Can I ask you what changes did you made to the LIPO battery? I have the same one and Im wondering how you configured it so that it suits the rest of the elektronics.
Why the separate tuning for balance point? The addition of a single button (press when the robot is upright and the current value is used as the cal value) and a couple lines of code make it easier. Better yet is fully self calibrating, but that is a bit more work-- I am too lazy to code it for an application like this.
Dude, can you tell me how you got to these levels of pid control?
this is excellent work , how small can this be feasible do you think , based on currently available components ?
wow Nice tutorial.. have its all details..