
- Видео 91
- Просмотров 436 884
richard pates
Швеция
Добавлен 2 май 2012
Senior Lecturer at Lund University. Interested in control theory, mathematics, acting, running and pretty pictures.
If you're interested in my teaching material, please see the playlists section. For a more structured presentation along with lecture slides and exercises, see the course homepages given in the links below.
FRTF15: Control Theory -- This course is designed as a complement to a basic course in control, and goes through some of the mathematics that underpins classical frequency domain and state-space methods.
FRTN05: Nonlinear Control -- This is an introductory course in nonlinear control, covering topics such as Lyapunov functions, describing functions and the circle criterion.
FRTF05: Basic Course -- This is an introductory course in control, going through all the good stuff from Nyquist and Bode plots, to pole placement, to PID control system design.
If you're interested in my teaching material, please see the playlists section. For a more structured presentation along with lecture slides and exercises, see the course homepages given in the links below.
FRTF15: Control Theory -- This course is designed as a complement to a basic course in control, and goes through some of the mathematics that underpins classical frequency domain and state-space methods.
FRTN05: Nonlinear Control -- This is an introductory course in nonlinear control, covering topics such as Lyapunov functions, describing functions and the circle criterion.
FRTF05: Basic Course -- This is an introductory course in control, going through all the good stuff from Nyquist and Bode plots, to pole placement, to PID control system design.
An Alternative Look at Peg Solitaire
A video about peg solitaire, parity arguments, and biscuits.
This video is for educational purposes. There is a lot of fun mathematics going on under the hood, including connections to linear programming, Diophantine equations and the mysteriously named Fredholm alternative. If you're interested, check out my write up here:
www.richardpates.com/an-alternative-look-at-peg-solitaire-part-i/
A pretty accessible entry to the mathematics of peg solitaire that I used a lot is "Winning Ways for your mathematical plays, vol IV", by Berlekamp, Conway and Guy (google for pdfs).
0:00-2:03 -- Introduction
2:03-3:25 -- The rules of peg solitaire, and solution to the English board
3:25-4:23 -- Phone a friend...
This video is for educational purposes. There is a lot of fun mathematics going on under the hood, including connections to linear programming, Diophantine equations and the mysteriously named Fredholm alternative. If you're interested, check out my write up here:
www.richardpates.com/an-alternative-look-at-peg-solitaire-part-i/
A pretty accessible entry to the mathematics of peg solitaire that I used a lot is "Winning Ways for your mathematical plays, vol IV", by Berlekamp, Conway and Guy (google for pdfs).
0:00-2:03 -- Introduction
2:03-3:25 -- The rules of peg solitaire, and solution to the English board
3:25-4:23 -- Phone a friend...
Просмотров: 940
Видео


Epic Pythagoras
Просмотров 1,2 тыс.2 года назад
Can the Pythagorean Theorem hold up against some epic music? There is only one way to find out... This video is for educational purposes. My main objective (which may have been lost in all the lightning strikes) was to emphasise the converse aspect of the Pythagorean theorem, and also showcase the technique of proof by contraposition. You can read more about all this here: www.richardpates.com/...
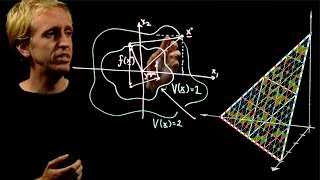
Lyapunov Stability via Sperner's Lemma
Просмотров 6 тыс.3 года назад
We go on whistle stop tour of one of the most fundamental tools from control theory: the Lyapunov function. But with a twist from combinatorics and topology. For more on Sperner's Lemma, including a simple derivation, please see the following wonderful video, which was my main source of inspiration for covering this topic: ruclips.net/video/7s-YM-kcKME/видео.html Towards the end the video thing...
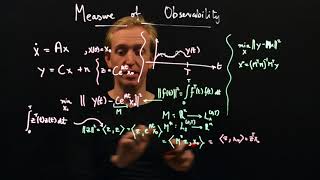
Optimal Estimates of Initial Conditions
Просмотров 5753 года назад
We solve the problem of optimally estimating an initial condition based on noisy measurements using least squares

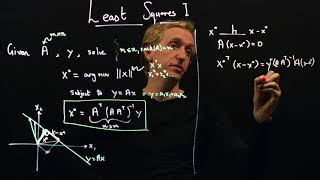
More Least Squares
Просмотров 4523 года назад
We introduce and solve a second type of least squares problem that often comes up in regression or estimation problems

Minimum Energy Control
Просмотров 2,1 тыс.3 года назад
We use our intuition from the least norm least squares problem to find the input that drives our system to the origin with the least energy

Controllable and Observable Subspaces
Просмотров 3,5 тыс.3 года назад
We relate the left and right null spaces of the controllability and observability matrix to the unreachable and/or unobservable parts of the state space of an uncontrollable and/or unobservable part of a state-space model

The Kalman Decomposition
Просмотров 10 тыс.3 года назад
The Kalman decomposition reveals the controllable and observable parts of a state-space model. We introduce and discuss the basic concept, as well as the connections to transfer function poles and zeroes.
Observability
Просмотров 2 тыс.3 года назад
We briefly introduce the concept of an observable state-space model, and how we can test for observability using the observability matrix.
Controllability Tests
Просмотров 2,4 тыс.3 года назад
We explain and derive the basic test for controllability using the controllability matrix.
A very brief introduction to friction
Просмотров 6483 года назад
A very brief introduction to friction
Calculating the describing function
Просмотров 2,1 тыс.3 года назад
Calculating the describing function
Harmonic balance and the describing function
Просмотров 1,7 тыс.3 года назад
Harmonic balance and the describing function
The KYP lemma and the passivity theorem
Просмотров 3,1 тыс.3 года назад
The KYP lemma and the passivity theorem
i Love your video, thank you for making it easy to understand
Shoutout to all my dreamers
You are the man!!
this explanation wasn't good.
Hero😭❤️
Thank you❤
Didn’t he say in the video that in this puzzle there are two jigsaw piece pairings that don’t change between the two solutions? Shouldn’t there then be two numbers that only appear once? Since there aren’t, surely that means he could’ve used more than just seven.
Nice lectures. In general, the gains should be chosen in such a way that the observer poles are faster than the controller poles.
This is amazing!!!
Sort of a tangential question (?). Does the eigenvalues of a system correlate to the lyapunov function somehow? Because I notice that negative eigenvalues means that the system is stable, a positive eigenvalue means that a system's exponents diverge, and a 0 eigenvalue means that the system is constant somehow and doesn't diverge to infinity or converge to 0. I feel like I'm drawing lines but I can't seem to generalize it.
The energy level correlation to the lyapunov function is beautiful and so intuitive
What video do I watch before this one?
Thank you! This was awesome
Prof, are your lecture notes posted online?like to study it besides watching your lecture video, Thanks
Thank you for explaining so clearly
Thanks! Really good explanation 👌
jesuse is god! ☺️ puzzle master
Hello, Richard! I believe you're implicitly assuming that $Im(A) \subset Im(B)$. Otherwise substituting $u$ like this wouldn't really work. Consider for instance A = [[0, -1], [1, 0]], B = [[0], [1]]; clearly the system is controllable, yet your argument doesn't work here.
You are the best, thank you very much
thank you so much for showing a proof thats accessible
Does a similar relationship hold between the magnitude and phase of transferfunction of solely the controller that is not set in a negative feedback loop?
holy cow are you writing mirrored? youre insanely talented
Very awesome video. I really wasn't able to understand it until I saw the video. Thank you very much.
can we think of the terminology of short and fat / tall and thin matrices in away associated with the over-determined system and under-determined system in relation with the number of unknowns and the number of equations
🌷🌷🌷 the best)
Thank u))
How do you approach to a general solution for stability from a stand point of a LYAPUNOV functions for a class of nth order nonlinearar differential equations?
You explained in 10 minutes what my university couldn't explain in 60.
had that figured out before I had even heard of lyapunov. Isn't this obvious?
sir give more information related to rechable set estimation using ellipsoid estimation ,polytopes,zonotopes
Amazing
Thank you Professor
It would be really great if these could be rerecorded without the heavy breathing noises.
when modelling the state space for a given system does y have to be the signal that is completely measured or can we choose a y where some compoenents of y aren't measurable ?
Hello Prof. Richard, Thank you very much for your useful lectures. I have a question, please. At time 23:20, you said that the b^2 will cancel each other. Can you kindly explain this, please? there might be a math error here
my man is the real hero
dude you are life saver thanks
love the transition from "imagine we have a linear system" to state vector nihilism almost immediately 😂
The theorem says that M is the largest invariant set in E, but what you described is positive invariance. Invariance is for all t, not just for nonnegative t.
I am outsider of the topic, I have a homework, and I understand nothing about it
Nyquist plot should start at -1 and and in 0.
Omg ur the Son of the Red Dwarf computer 👏🏽
hahaha - a blast from the past, but spot on!
Hi Richard, I am Joel from Argentina and I am currently studying A&C in Germany.. Your videos are really useful, I really appreciate your dedication and effort to help students ! I will recommend your RUclips channel with my classmates, wish you a incredible and successful future
Thank you Joel! Your kind words mean a lot. I wish you the same!
Great video, thanks for this explanation.
Exceptionally clear. Thank you! Just one bit that confused me: you indicated the argument that F(s0) makes with the Re axis as negative, and the argument of F(s1) as positive. Both are BELOW the Re axis, though - is this not inconsistent?
the only thing you care about is the ORIENTATION of the angle: the arrow that points in F(s0) goes "down" from the real axis. Instead, the angle the arrow that points to F(s1) is positive 'cause it follows the positive orientation of angles, hence it's positive even if the arrow itself is in the 3rd quadrant
@@Arty_x_g Ah - of course! That’s what I was missing! Thank you very much for taking the time to respond - kindest, Ralph
Thank for you dedication, every other content about this is so confusing. your more graphical explanation at least made realize how is suposed to use this method
I noticed that this fact is trivial if the matrix is diagonalizable.
It's always nice seeing how that kind of insight and intuition can generalise - or not. Definitely a fun part of learning. Thanks for watching!
@@richard_pates here’s a fun question, can you generalize the Hamilton Cayley theorem in general using SVD?
@@joshuaiosevich3727 interesting thought! I'm a bit unsure where I'd start - the connection between the characteristic polynomial and eigenvalues rather than singular values might be tricky to get around. But I've been wrong plenty of times before, and I know there are all sorts of generalisations of the cayley hamilton theorem into other more exotic algebraic situations, so there could be something!
This is beautiful.. Did you make it in manim or blender..?
Thank you! I made this with manim. For all the collision detection I used the manim-physics package which makes use of pymunk I think
@@richard_pates could you kindly share the code.
Thank you very much!!!!!🥰
Thanks for making these videos! They help reinforce my school lectures