Thank you so much for your video. They are extremely helpful. Regarding this video, I would like to point out a small mistake. In the feedback loop, u=-h(x)*y. So, in the result of V dot, the term should be -u*y^2.
Hello! Thanks for the reply and the kind words, I really appreciate it! Perhaps I caused a bit of confusion in how I was drawing the diagram. In the feedback path I put h(.) in the block. In this notation all I meant was that the function h acts on the signal being fed in, meaning that the output of the block is h(y), which in turn means that u=-h(y). I should have just written out all the equations, to avoid this confusion! But in summary, you can use the tools in the video to study the set of equations \dot{x}=Ax+Bu, y=Cx, u=-h(y). And the final step in the argument uses the fact that for the type of sector bounded nonlinearity considered, yu=-h(y)y
good question! This is a lot to take in in a video, and there is a huge amount of depth to this topic. As a general resource, I would recommend Boyd and co.'s book 'Linear Matrix Inequalities in System and Control Theory'. You can get a pdf for free online, and it contains lots of examples illustrating how the KYP lemma (and all sorts of other things) can be used to formulate and solve control problems.









Thanks for a very nice explanation. Hopefully we can have a chance to talk about this topic in the future since I am doing PhD in Sweden :D
Sounds good!
Thank you so much for your video. They are extremely helpful. Regarding this video, I would like to point out a small mistake. In the feedback loop, u=-h(x)*y. So, in the result of V dot, the term should be -u*y^2.
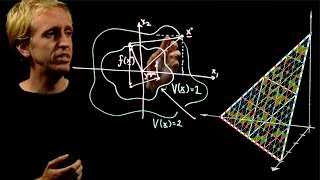
Hello! Thanks for the reply and the kind words, I really appreciate it! Perhaps I caused a bit of confusion in how I was drawing the diagram. In the feedback path I put h(.) in the block. In this notation all I meant was that the function h acts on the signal being fed in, meaning that the output of the block is h(y), which in turn means that u=-h(y). I should have just written out all the equations, to avoid this confusion!
But in summary, you can use the tools in the video to study the set of equations \dot{x}=Ax+Bu, y=Cx, u=-h(y). And the final step in the argument uses the fact that for the type of sector bounded nonlinearity considered, yu=-h(y)y
nice explanation sir can I get more material on this topic ?
good question! This is a lot to take in in a video, and there is a huge amount of depth to this topic. As a general resource, I would recommend Boyd and co.'s book 'Linear Matrix Inequalities in System and Control Theory'. You can get a pdf for free online, and it contains lots of examples illustrating how the KYP lemma (and all sorts of other things) can be used to formulate and solve control problems.