![Soft Robotics Lab [SRL] / ETH Zurich](/img/default-banner.jpg)
- Видео 35
- Просмотров 60 219
Soft Robotics Lab [SRL] / ETH Zurich
Швейцария
Добавлен 19 мар 2021
The Soft Robotics Lab has been founded in July 2020 by Prof. Robert Katzschmann, previously of MIT. With experience in designing soft, flexible, and adaptive robots the team will further develop, fabricate and design ground breaking control systems to push the abilities of robots for real life applications.
In recent years the research has gained extensive attention from news and media alike. These include The New York Times, The Wall Street Journal, National Geographic, Reuters, BBC, NBC News, Nature, CNN, Wired, CNBC, TechCrunch, LA Times, NPR, CNET, Mashable, The Verge, Forbes, IEEE Spectrum, Popular Mechanics, Science Magazine and Scientific American.
In recent years the research has gained extensive attention from news and media alike. These include The New York Times, The Wall Street Journal, National Geographic, Reuters, BBC, NBC News, Nature, CNN, Wired, CNBC, TechCrunch, LA Times, NPR, CNET, Mashable, The Verge, Forbes, IEEE Spectrum, Popular Mechanics, Science Magazine and Scientific American.
SMORS: A soft multirotor UAV for multimodal locomotion and robust interaction
SMORS is the first Soft fully actuated MultirOtoR System for multimodal locomotion. Unlike conventional hexarotors, SMORS is equipped with three rigid and three continuously soft arms, with each arm hosting a propeller. We create a bridge between the fields of soft and aerial robotics by mechanically coupling the actuation of a fully actuated flying platform with the actuation of a soft robotic manipulator. Each rotor is slightly tilted, allowing for full actuation of the platform. The soft components combined with the platform’s full actuation allow for a robust interaction, in the form of efficient multimodal locomotion. In this work, we present the dynamical model of the platform, deri...
Просмотров: 457
Видео


Task-defined Pulley Design for Nonlinearly Coupled Tendon-driven Actuation
Просмотров 3192 месяца назад
Coupled actuation is a common strategy for reducing the number of actuators in robots with high degrees of freedom. Coupled actuation leads to an underactuation that lowers system complexity and weight. However, an approach for a controlled nonlinear coupling of multiple tendons does not exist for tendon-driven actuation. We propose a method to enable task-defined non-linearly coupled actuation...

Multi-Tap Resistive Sensing and FEM Modeling Enables Shape and Force Estimation in Soft Robots
Просмотров 1,3 тыс.2 месяца назад
"Multi-tap Resistive Sensing and FEM Modeling Enables Shape and Force Estimation in Soft Robots" by Sizhe Tian*, Barnabas Gavin Cangan*, Stefan Escaida Navarro, Artem Beger, Christian Duriez, and Robert K. Katzschmann ETH Zurich's Research Collection: www.research-collection.ethz.ch/handle/20.500.11850/653572 Arxiv: arxiv.org/abs/2311.14566

Sensorized Soft Skin for Dexterous Robotic Hands - ICRA 2024
Просмотров 1,9 тыс.2 месяца назад
A capable robotic hand requires an artificial skin for suitable grip and a sense of touch. We here propose sensorized soft skins for dexterous robotic hands. We introduce our multi-material 3D-printing technique for prototyping and silicone casting for skin manufacturing. Force and dynamic tests demonstrate the skin's contribution to object manipulation. We show how piezoresistive pressure sens...

High-Frequency Capacitive Sensing for Electrohydraulic Soft Actuators
Просмотров 4912 месяца назад
Michel R. Vogt, Maximilian Eberlein, Clemens C. Christoph, Felix Baumann, Fabrice Bourquin, Wim Wende, Fabio Schaub, Amirhossein Kazemipour, Robert K. Katzschmann The need for compliant and proprioceptive actuators has grown more evident in pursuing more adaptable and versatile robotic systems. Hydraulically Amplified Self-Healing Electrostatic (HASEL) actuators offer distinctive advantages wit...
Self-Sensing Feedback Control of an Electrohydraulic Robotic Shoulder
Просмотров 7392 месяца назад
Clemens C. Christoph, Amirhossein Kazemipour, Michel R. Vogt, Yu Zhang, Robert K. Katzschmann The human shoulder, with its glenohumeral joint, tendons, ligaments, and muscles, allows for the execution of complex tasks with precision and efficiency. However, current robotic shoulder designs lack the compliance and compactness inherent in their biological counterparts. A major limitation of these...

Artificial muscles - Low voltage electrohydraulic actuators for untethered robotics
Просмотров 4 тыс.6 месяцев назад
We present hydraulically amplified low-voltage electrostatic (HALVE) actuators that match mammalian skeletal muscles in average power density (50.5 watts per kilogram) and peak strain rate (971% per second) at a 4.9 times lower driving voltage (1100 volts) compared to the state of the art. HALVE actuators are safe to touch, are waterproof, and exhibit self-clearing properties. We characterize, ...

Building Robotic Hands - The Highlights of Real-World-Robotics 2023
Просмотров 1,3 тыс.6 месяцев назад
Dive into the first edition of our new Real-World-Robotics class at ETH Zürich! Our students embarked on an incredible journey, creating their human-like robotic hands from scratch. In just three months, the teams designed, built, and programmed their tendon-driven robotic hands, mastering dexterous manipulation with reinforcement learning! The result? A spectacular display of innovation and sk...

Bringing Robots to the World | ETH Zürich Real World Robotics Tutorial 7
Просмотров 4248 месяцев назад
In this video, Professor Robert Katzschmann converses with Prof. Dr. Mirko Meboldt about bringing your prototype to the market, sharing examples of startups or ETH spin-offs. We hope this discussion will inspire you regarding the focus and considerations necessary when developing your prototype design into a real product.
[manipulation RL tutorial] faive_gym: train your own robot hand with IsaacGym in the GPU
Просмотров 2,1 тыс.8 месяцев назад
This video explains the faive_gym framework for manipulation reinforcement learning which uses the GPU-based Isaac Gym simulator. We start from the basic examples for cube manipulation with the Faive Hand, and at the end explain how you can load your own robot hand in the framework. Resources faive_gym : github.com/srl-ethz/faive_gym_oss Faive Robotics: www.faive-robotics.com/ Tutorial: create ...
Advancing Robust Controllers with Reinforcement Learning | ETH Zürich Real World Robotics Tutorial 6
Просмотров 2398 месяцев назад
In this video, Professor Robert Katzschmann recaps neural networks and their application in image classification. The discussion then delves into reinforcement learning, exploring agent-environment interactions, rewards, actions, and observations. Concepts like policy, value function, and Q function are introduced, leading to a demonstration of the Q learning algorithm. The video also covers th...
Teleoperation using Machine Learning and Computer Vision | ETH Zürich Real World Robotics Tutorial 5
Просмотров 3638 месяцев назад
In this video, Professor Robert Katzschmann introduces teleoperation by dividing it into three main components: sensing, mapping and control. In particular, he explained a stereo camera set-up to detect the hand pose in the sensing part of the task, a mapping from our five-fingered hand to an arbitrary robotic hand, and finally discussed how to use previously seen algorithms to move the hand in...
Implementing Control Strategies for Manipulation | ETH Zürich Real World Robotics Tutorial 4
Просмотров 3549 месяцев назад
In this video, Professor Robert Katzschmann introduces how to control robotic hands for manipulation challenges. You will discover several sensing and estimation methodologies. After that, different control techniques are discussed, such as trajectory control, dynamic control, and task-space control. At the end of this tutorial, challenges that we might encounter in control and how we could sol...
Identifying Kinematics and Dynamics of Robots | ETH Zürich Real World Robotics Tutorial 3
Просмотров 5259 месяцев назад
In this video, Professor Robert Katzschmann introduces general concepts of robot kinematics and dynamics, before explaining forward and inverse kinematics between joint space and task space. He then dives deeper into kinematics and dynamics for various joint designs, with a focus on rolling-contact joints.
Simulating Robots and Soft Interactions with the World | ETH Zurich Real World Robotics Tutorial 2
Просмотров 1,1 тыс.9 месяцев назад
Unit 4: Simulation Tutorial 2 of the Real World Robotics Class 2023 at ETH Zürich. Professor Robert Katzschmann gives an introduction to the world of simulations - a powerful tool for visualizing and refining your robotic hand designs before they arrive at the fabrication stage. You will discover several ways of generating simulation that can be useful for a reinforcement learning process. Prof...
Building and Fabricating an Articulated Robot Hand | ETH Zurich Real World Robotics Tutorial 1
Просмотров 12 тыс.10 месяцев назад
Building and Fabricating an Articulated Robot Hand | ETH Zurich Real World Robotics Tutorial 1
Why do we build robotic hands? | ETH Zurich Real World Robotics Tutorial 0
Просмотров 1,5 тыс.10 месяцев назад
Why do we build robotic hands? | ETH Zurich Real World Robotics Tutorial 0
Bioprinting of Perfusable Skeletal Muscle Tissue
Просмотров 3,2 тыс.10 месяцев назад
Bioprinting of Perfusable Skeletal Muscle Tissue
Meta-Learning via Classifier(-free) Diffusion Guidance
Просмотров 37310 месяцев назад
Meta-Learning via Classifier(-free) Diffusion Guidance
Getting the Ball Rolling: Learning a Dexterous Policy for a Biomimetic Tendon-Driven Hand
Просмотров 2,9 тыс.Год назад
Getting the Ball Rolling: Learning a Dexterous Policy for a Biomimetic Tendon-Driven Hand
Autonomous Marker-Less Rapid Aerial Grasping
Просмотров 98Год назад
Autonomous Marker-Less Rapid Aerial Grasping
DeSKO: Stability-Assured Robust Control with a Deep Stochastic Koopman Operator
Просмотров 275Год назад
DeSKO: Stability-Assured Robust Control with a Deep Stochastic Koopman Operator
Learning Material Parameters and Hydrodynamics of Soft Robotic Fish via Differentiable Simulation
Просмотров 365Год назад
Learning Material Parameters and Hydrodynamics of Soft Robotic Fish via Differentiable Simulation
Planar Modeling and Sim-to-Real of a Tethered Multimaterial Soft Swimmer Driven by Peano-HASELs
Просмотров 433Год назад
Planar Modeling and Sim-to-Real of a Tethered Multimaterial Soft Swimmer Driven by Peano-HASELs
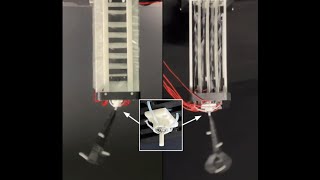
Model-Based Disturbance Estimation for a Fiber-Reinforced Soft Manipulator using Orientation Sensing
Просмотров 8242 года назад
Model-Based Disturbance Estimation for a Fiber-Reinforced Soft Manipulator using Orientation Sensing
Flying Hydraulically Amplified Electrostatic Gripper System for Aerial Object Manipulation
Просмотров 6252 года назад
Flying Hydraulically Amplified Electrostatic Gripper System for Aerial Object Manipulation
ICRA 2022 - Adaptive Dynamic Sliding Mode Control of Soft Continuum Manipulators
Просмотров 2,2 тыс.2 года назад
ICRA 2022 - Adaptive Dynamic Sliding Mode Control of Soft Continuum Manipulators
Short summary presentation of the Aerial Manipulator
Просмотров 2512 года назад
Short summary presentation of the Aerial Manipulator
Modeling and Control of an Omnidirectional Micro Aerial Vehicle Equipped with a Soft Robotic Arm
Просмотров 3662 года назад
Modeling and Control of an Omnidirectional Micro Aerial Vehicle Equipped with a Soft Robotic Arm
RAPTOR: Rapid Aerial Pickup and Transport of Objects by Robots
Просмотров 6582 года назад
RAPTOR: Rapid Aerial Pickup and Transport of Objects by Robots
Amazing research and implementation, thanks for sharing!
That is really a fascinating approach! You just made me think, its not as if birds fly continuously, they take breaks or benefit from the areo-dynamics of a working together in a configuration. Amazing work!
Is this design open source 😮
This is SO COOL!!!! I'm a student rn trying to study this stuff because i want to go into the field of bio-mechanical engineering and help with stuff like this!!!!!!! I've found your video to be very helpful tysm!
what is the muscular cell density in the bioink, compared to the soft tissue in vivo? a few percent? then, how relevant is the lab-grown physiology to native tissue?
Living tissue over a hyperalloy endeo skeleton combat chassis.
I wish this awesome technology could be used on upper limb prosthetics, as they are not really helpful and advanced now.
Wow that's a first time I find so structurend and well explained video about robots in Omniverse. NVIDIA official videos are so bad
agreed
Well this is a real new concept to me and I really thankfult for this video. I feel this is a reall promising concept. Thank you for makeing this video
Is strong enough to lift weight like 20kg?.
Very thorough, and you're not trying to claim miraculous results from subpar research. Well done, this is very interesting technology!
Very cool work, in the future robots will be able to "quantitatively" perceive.
mega!👌🏼
Been waiting for a post
Do you need another set of circuits to obtain location information?
🎉
Cool illustration
I miss you guys!
Advanced materials will be asked how to apply them on a large scale.
Is it faster as HASEL actuator?.
How are you incorporating these developments in the latest round of humanoids robots?
What is the swimming speed of soft robotic swimmer?
Hello! The current fish design reaches a speed of 3.8 cm s−1 or 0.14 bodylength/s with 2-Hz antagonistic actuation.
Introduce chatgpt to define reward functions?
Good point, NVIDIA actually had a similar project where they used LLMs to define reward functions! blogs.nvidia.com/blog/eureka-robotics-research/
Vielen Dank!
What role does AI play in this project?
Do you source all of your components locally? What do you estimate is the cost breakdown for your latest iteration?
Any chance of a close up of the gearing that you are using to get all those DOF?
Have you considered PCB magnetic actuators as demonstrated by Carl Bugeja? ruclips.net/video/M3HqYx6Y0nM/видео.html Could these be used to control the top of the finger joint, which seems to be more about dexterity that strength....?
What would be the overall decrease in dexterity if you were to combine the two smaller fingers into a single digit? Would one less finger represent a 20% decrease in complexity, weight and printing requirements? Might I also suggest an addition to your Joint Type diagram at 8.08. As well as flexure, what about compliant mechanism designed using computational origami.
Do you know of anybody researching computational origami in order to make a compliant mechanism that could act as a skeleton for the hand?
the rubiks cube logo thing at the start is actually the wrong colour scheme
Beutiful viedo
Is the pressure feedback system only on the last joint? Could flexible pressure sensors be distributed throughout the palm?
They could but they would probably limit strength. Sailmakers use a special reinforced palm which gives them enormous power to sew heavy materials, but at the sacrifice of sensation.
This looks so much like a real hand!
great .. keep motivating us
cool :)
Impressive Research
Unsupervised learning?
Outstanding work! The flexibility is the same as that of a human hand!
0.0
Looks super promising! Nicely done!
Awesome work
Damn, imagine someday someone using a drone just to boink your head
I wouldn‘t want to boink my head with our drone… that could easily be your last boink - Aurel
This reminds me of an elephants trunk, is that what it is based on?
yes, this arm is inspired by an elephant trunk
Adding gripper looking thing at the end is vital otherwise....
😣 ≋p≋r≋o≋m≋o≋s≋m
What is the proprioceptive sensor? Is it FBG fibers?
great work, by the way!!
Thank you for your comment! We’ve used the 2-axes flex sensors from Bend Labs. www.bendlabs.com/ We did discuss using FBG sensors, but for this particular project we decided to go with a much simpler and lower cost (about $100 each) solution. - Yasunori
@@softrobotics Very neat! Looking forward to your future work
@@softrobotics Also, a follow up, How did y'all map the simulated result coordinates to the 2-d image of the ground truth ?
@@user-lt5no1xt1z Thanks for the comment, the overlay effect from 0:45 - 0:58 was achieved with the Qualisys Track Manager (QTM) software that we use for motion capture. The camera view is from Qualisys' RGB camera, whose pose is known in the motion capture space since it is calibrated. We import the simulated trajectory into QTM using the motion capture coordinates, and we export the video with the overlay enabled. - Yasunori
Love your work! Good luck for future works!
Nice video! You deserve more views. You should use promosm, I’ve been using it on my main channel and now my videos are ranking better!
I too would like to know about this thing called “promosm”
Nice!