Fantastic idea and exactly what I was looking for for my project! Now that I’m looking at it, I can see plenty of ways to improve its efficiency. Firstly, the gear teeth on the rod are straight, but they should be angled to better match the wheel on the servo. Secondly, if the rod were bent for better contact with the wheel, it would result in greater force. Definitely worth considering, but the idea is great. Thumbs up!
I would not recommend powering it through the ESP32 like that. Servos can draw a decent amount of power and by connecting it to the 3.3 V of the ESP32 you are putting all that load on the ESP32’s voltage regulator, which likely isn’t meant to handle much more than the ESP32 itself. You could also end up damaging something due to voltage spikes from the motor. The best option is to use a battery or a source that you know can handle it. You would also be better if you just connected it to the 5 V of the ESP32 since that comes straight from the USB and doesn’t go through the voltage regulator. I would be very careful when powering things through USB too since at its base level the USB spec only requires 5 V and 500 mA output which isn’t much and sometimes over current and short circuit protection don’t work right. I would highly recommend getting a powered USB hub just to add an extra layer of protection between your PC and some homemade electronics, just in case something goes wrong, like accidentally shorting the 5 V pin to ground by accidentally touching a screw or similar. You really don’t want to damage the USB ports on your laptop or PC.
@@pRoFlT I was thinking also maybe a magnet on the rack and a hall effect sensor. But honestly it does just fine if you let it go backwards an extra second or two to make it bump against the back and therefor at ‘position 0’ ready to go forward again. Although adapting it to make a sliding potentiometer would be cool, can’t do it :) worm gears are one direction.
The problem with that would be that it would mess with the control logic in the servo. It likely uses a feedback loop tuned for the servo and if you go modifying its feedback and output then it could make it performs pretty badly. You can see this if you attach a load (still within spec) to cheap servos, they get all jittery and overshoot, this is because the control logic is tuned for it having no load.







![Seungmin "그렇게, 천천히, 우리(As we are)" | [Stray Kids : SKZ-PLAYER]](http://i.ytimg.com/vi/kAzmhLHePqU/mqdefault.jpg)

make your own! makerworld.com/en/models/808431#profileId-749283
Fantastic idea and exactly what I was looking for for my project! Now that I’m looking at it, I can see plenty of ways to improve its efficiency. Firstly, the gear teeth on the rod are straight, but they should be angled to better match the wheel on the servo. Secondly, if the rod were bent for better contact with the wheel, it would result in greater force. Definitely worth considering, but the idea is great. Thumbs up!
@@gajdosjozef9048 appreciate the feedback! All great ideas 💪
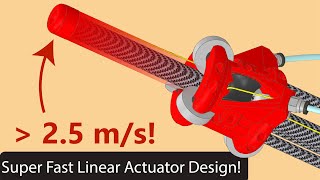
Angling the teeth on the rack to match the angle of the worm pitch could improve mechanical engagement
Oh nice, right on! Thanks for the heads up.
Beautifully simple design, so clever
@@kdt85 Thanks!
Oh hell yeah man, was just looking into this type of idea!
🦾
This is fantastic. Im going to use this in my build!
nice!
Pretty cool man!
Thanks bro!!
this is awesome man! Im going to try to use this in my next robot/project. Thanks for sharing
@@superradmaker nice! Love that I ran across
your channel, man! Keep up the hard work on your rad robotics development quest. 🙏
@@RealSnail3D will do thank you!
Very cool project! I liked it so much I paid to download it just for the coolness factor. No actual use yet, but, it's pretty dang cool!
Thank you sir!!! Your support means the world to me 🙏
I would not recommend powering it through the ESP32 like that. Servos can draw a decent amount of power and by connecting it to the 3.3 V of the ESP32 you are putting all that load on the ESP32’s voltage regulator, which likely isn’t meant to handle much more than the ESP32 itself. You could also end up damaging something due to voltage spikes from the motor. The best option is to use a battery or a source that you know can handle it. You would also be better if you just connected it to the 5 V of the ESP32 since that comes straight from the USB and doesn’t go through the voltage regulator.
I would be very careful when powering things through USB too since at its base level the USB spec only requires 5 V and 500 mA output which isn’t much and sometimes over current and short circuit protection don’t work right. I would highly recommend getting a powered USB hub just to add an extra layer of protection between your PC and some homemade electronics, just in case something goes wrong, like accidentally shorting the 5 V pin to ground by accidentally touching a screw or similar. You really don’t want to damage the USB ports on your laptop or PC.
@@conorstewart2214 Appreciate it! To say i’m a novice wouldn’t be fair to novices, so I really appreciate your expert input.
Could modify a normal servo. Pull out the pot and connect to slide somehow. then you could have position control as well. maybe a slider pot?
@@pRoFlT I was thinking also maybe a magnet on the rack and a hall effect sensor. But honestly it does just fine if you let it go backwards an extra second or two to make it bump against the back and therefor at ‘position 0’ ready to go forward again.
Although adapting it to make a sliding potentiometer would be cool, can’t do it :) worm gears are one direction.
The problem with that would be that it would mess with the control logic in the servo. It likely uses a feedback loop tuned for the servo and if you go modifying its feedback and output then it could make it performs pretty badly.
You can see this if you attach a load (still within spec) to cheap servos, they get all jittery and overshoot, this is because the control logic is tuned for it having no load.
Buena idea, cordial saludo desde Colombia
@@ivanalexandergranadaacosta Muchos Gracias!
SNAILLLL!
Nothing said about modifying the servo to make it turning endless? 😢
@@baxbanni2226 it’s a continuous 360 servo 👍. Follow the link to Printables and there are amazon links :)
You can buy them now, you don’t need to modify them yourself.