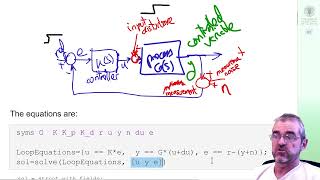
Double integrator: trial-and-error controller tuning [1: PD proportional-derivative] empirical PIDs
US
Войти
Double integrator, PD control: stability analysis (theory)
20:59
[FUll] Pengamat Soal PPN 12 % & Hujan Pungutan Jadi Impitan Ekonomi Rakyat Indonesia
22:04
PLC Troubleshooting 101. Basic Steps to Diagnose and Fix Your Machine
37:15
Joe Burrow, Zac Taylor HEATED Altercation After Bengals Run Up The Score! Burrow SNAPS At Taylor!
01:13
We Took 100 Shots vs a Women's Pro Keeper and Scored ___ Goals
22:55
Avengers wake up, Marvel Rivals is fire
18:15
Double integrator: trial-and-error controller tuning [1: PD proportional-derivative] empirical PIDs
Modeling, Identification, Control (A. Sala)
Подписаться
375
Скачать
Готовим ссылку...
Просмотров 108
0
0
Добавить в
Мой плейлист
Посмотреть позже
Поделиться
Поделиться
HTML-код
Размер видео:
1280 X 720
853 X 480
640 X 360
Показать панель управления
Автовоспроизведение
Автоповтор
Опубликовано: 19 дек 2024
Комментарии •
Следующие
Автовоспроизведение
20:59
Double integrator, PD control: stability analysis (theory)
Modeling, Identification, Control (A. Sala)
Просмотров 44
22:04
[FUll] Pengamat Soal PPN 12 % & Hujan Pungutan Jadi Impitan Ekonomi Rakyat Indonesia
KOMPASTV JAWA TIMUR
Просмотров 132 тыс.
37:15
PLC Troubleshooting 101. Basic Steps to Diagnose and Fix Your Machine
Tim Wilborne
Просмотров 74 тыс.
01:13
Joe Burrow, Zac Taylor HEATED Altercation After Bengals Run Up The Score! Burrow SNAPS At Taylor!
BehindThePlay
Просмотров 420 тыс.
22:55
We Took 100 Shots vs a Women's Pro Keeper and Scored ___ Goals
ChrisMD
Просмотров 1,1 млн
18:15
Avengers wake up, Marvel Rivals is fire
zanny
Просмотров 1,1 млн
04:07
Seungmin "그렇게, 천천히, 우리(As we are)" | [Stray Kids : SKZ-PLAYER]
Stray Kids
Просмотров 1,3 млн
30:36
Physics Students Need to Know These 5 Methods for Differential Equations
Physics with Elliot
Просмотров 1,1 млн
11:25
Double integrator: trial and error empirical PID tuning [2: PID , 3: 2doF advanced modifications]
Modeling, Identification, Control (A. Sala)
Просмотров 23
12:32
Why Japan’s Outlets are Safer than USA
Andrew Lam
Просмотров 12 тыс.
21:49
double-integrator PID controller design: pole placement (3rd order closed loop)
Modeling, Identification, Control (A. Sala)
Просмотров 18
7:08
Empirical PID gain tuning (Kevin Lynch)
Northwestern Robotics
Просмотров 166 тыс.
16:40
I never understood why you can't go faster than light - until now!
FloatHeadPhysics
Просмотров 4,7 млн
14:36
Feedback linearization/decoupling: two-input two-output example (hand-made, no Matlab)
Modeling, Identification, Control (A. Sala)
Просмотров 74
12:13
Model Predictive Control
Steve Brunton
Просмотров 272 тыс.
17:54
Double-integrator control (1): motivation (position control, force actuator, cascade control)
Modeling, Identification, Control (A. Sala)
Просмотров 78
08:56
"Yurayotgan mashinalar yonib ketdi" - guvohlar
KunUZ
Просмотров 2,2 млн
01:13
Мишленовское оливье от Екатерины Алехиной⭐️ Гриль BORK
dacooker_
Просмотров 1,4 млн
08:01
🔴Шокирующие подробности убийства генерала Кириллова: кто его убил?
ВОТ ТАК NOW
Просмотров 411 тыс.
38:58
ИЗБА НА САНЯХ. ВЫШКА СССР РУХНУЛА. ЗАДЫМЛЕНИЕ. ДОБЫЛ КУНИЦУ.
-ТАЁЖНЫЙ-
Просмотров 565 тыс.
01:00
Нарвался на опасного зека 😳
Edward Bil
Просмотров 267 тыс.
54:18
ТЕСЛА против ФОЛЬКСВАГЕН ПОЛО. ДОРОХОВ х АСАФЬЕВ / РАЗГОН НА ТРЕКЕ
Разгон
Просмотров 440 тыс.
00:59
ШАЛОСТЬ (смешное видео, приколы, юмор, поржать)
Натурал Альбертович
Просмотров 2,3 млн
00:19
СПОРИМ ТЫ НЕ ЗНАЕШЬ ТРИ СЛОВА НА БУКВУ О? #shortsvideo #юмор #катяклон #comedy #прикол #мамадочка
Katya Klon
Просмотров 867 тыс.


![[FUll] Pengamat Soal PPN 12 % & Hujan Pungutan Jadi Impitan Ekonomi Rakyat Indonesia](http://i.ytimg.com/vi/7vWL4mKfPSA/mqdefault.jpg)




![Seungmin "그렇게, 천천히, 우리(As we are)" | [Stray Kids : SKZ-PLAYER]](http://i.ytimg.com/vi/kAzmhLHePqU/mqdefault.jpg)
