
- Видео 124
- Просмотров 14 754
Modeling, Identification, Control (A. Sala)
Испания
Добавлен 10 окт 2023
Educational videos plus PDF/source code for Engineering and Computer Science students in Modeling, identification, and Control topics from Antonio Sala, professor at Universitat Politecnica de Valencia (UPV), Spain.
This channel will collect my videos in English language on the above topics.
Emphasis is on basic concepts, intuition and application ideas, and Matlab code. The videos contain simplifications and omissions, so they may not be optimal for a specialized Mathematics audience or senior researchers, who will demand a more formal treatment.
I have a twin channel www.youtube.com/@asalacontrol , where videos in Spanish are uploaded.
There are a few videos in English there, but I will eventually migrate all non-Spanish materials to this channel.
Please subscribe to both !-) channels if you understand Spanish, of course!.
At personales.upv.es/asala/YT/indexEN.html you have all published videos in English, sorted by topic.
This channel will collect my videos in English language on the above topics.
Emphasis is on basic concepts, intuition and application ideas, and Matlab code. The videos contain simplifications and omissions, so they may not be optimal for a specialized Mathematics audience or senior researchers, who will demand a more formal treatment.
I have a twin channel www.youtube.com/@asalacontrol , where videos in Spanish are uploaded.
There are a few videos in English there, but I will eventually migrate all non-Spanish materials to this channel.
Please subscribe to both !-) channels if you understand Spanish, of course!.
At personales.upv.es/asala/YT/indexEN.html you have all published videos in English, sorted by topic.
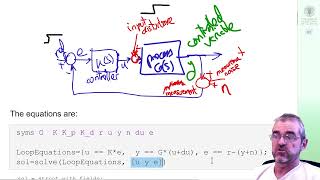
Controlled/manipulated variable selection: setpoint tracking, SVD example (1)
This video, the first of a case study with a total of 7 videos, poses the problem of determining if a process y=Gu has properly chosen controlled variables 'y' and manipulated variables 'u', to be able to increase 'y' a minimum amount required for a given application (setpoint tracking). Only the steady state case (static gain matrix) is discussed. The full case study is in the playlist ruclips.net/p/PLUznGnCqeYccbW5-vNqeWf14y2IcC1Bxk .
In this first video, the problem is presented, and its resolution is addressed using SVD methodology (geometry of ellipses, or spheres of radius 1 once scaled). The scaling process is reviewed and, subsequently, the scaled transfer matrix and the minimum ga...
In this first video, the problem is presented, and its resolution is addressed using SVD methodology (geometry of ellipses, or spheres of radius 1 once scaled). The scaling process is reviewed and, subsequently, the scaled transfer matrix and the minimum ga...
Просмотров: 11
Видео

double-integrator PID controller design: pole placement (3rd order closed loop)
Просмотров 1716 часов назад
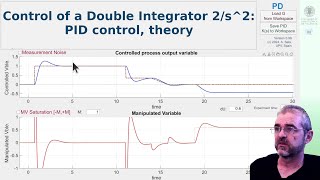
This video designs a full-fledged PID to meet zero position error specifications, both under reference changes and under input disturbances (step) of a double integrator process. We have the ability to assign three closed-loop poles with the three PID gains to tune. This concludes the case study that began with purely intuitive tuning in the video ruclips.net/video/81LBTN9imAk/видео.html , and ...
Karhunen-Loeve (PCA) components, Gaussian Processes: Matlab example (1)
Просмотров 28День назад
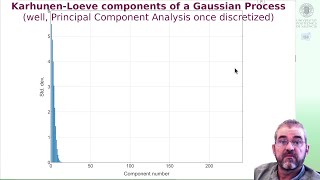
This video presents how to obtain the principal components (renamed as Karhunen-Loeve eigenfunctions in the continuous limit case) of a stochastic Gaussian process, with a 'quadratic exponential' covariance kernel (said kernel choice was arbitrary). For simplicity and for graphical representations, a 'discrete' set of 241 test points will be considered, to analyze the structure of the covarianc...
double-integrator PD control design: pole placement
Просмотров 2314 дней назад
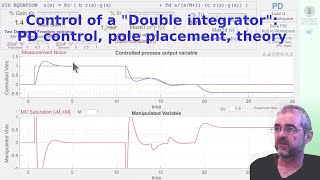
This video designs a PD controller for the double-integrator plant G(s)=2/s^2, to meet certain static (zero position error with reference step change, limited steady-state drift when subject to input disturbances) and dynamic (settling time less than or equal to 2 seconds, damping coefficient \chi greater than or equal to 0.7) specifications. The design is based on the final value consideration...
Double integrator PD control: position and velocity errors, setpoint tracking, disturbance rejection
Просмотров 1821 день назад
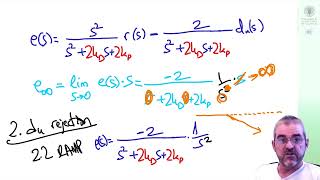
This video is a continuation of the video ruclips.net/video/0Y5Vf1zDqG0/видео.html ; in that video the closed loop poles of a double integrator with PD control were analyzed (it was stable, oscillatory or not depending on the amount of derivative action); in the present video, the error in steady state is analyzed. Applying the final value theorem with a control law K_P·e K_D·de/dt and G(s)=2/s...
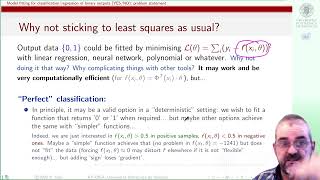
Model fitting for classification (3): are Least Squares a sensible choice? Probably not so...
Просмотров 4321 день назад
This video discusses the applicability (well, rather the NON-applicability, at least in a general setting) of least squares in classification; The video is a continuation of the videos ruclips.net/video/0F5ZTHwWqCU/видео.html and ruclips.net/video/n3fVLEFwsTM/видео.html . Although "least squares" for fitting a function f(x,\theta) to training data {-1, 1} might be reasonable as a first option t...
![Double integrator: trial and error empirical PID tuning [2: PID , 3: 2doF advanced modifications]](http://i.ytimg.com/vi/81LBTN9imAk/mqdefault.jpg)
Double integrator: trial and error empirical PID tuning [2: PID , 3: 2doF advanced modifications]
Просмотров 23Месяц назад
This video constitutes `Part 2' of the trial-and-error heuristic tuning of a PID controller for a double-integrator (motion control) plant; PD control was discussed in video ruclips.net/video/vjpCo4j9s6k/видео.html , and in here, we'll discuss integral action for zero offset in disturbance rejection, antiwindup, and a final summary, conclusions and remarks. First, it is intuitively justified th...
Double integrator, PD control: stability analysis (theory)
Просмотров 44Месяц назад
This video presents the theory that justifies the behavior we had found by `trial and error' when tuning a PID controller for a `double integrator' process 2/s^2; see video ruclips.net/video/vjpCo4j9s6k/видео.html for such hand-tuning ideas, important in practical control engineering. In this first video on the underlying theory, the generic closed-loop equations e(s)=1/(1 GK)·r(s)-G/)(1 GK)·d_...

Model fitting for classification (2): probabilistic version, problem statement
Просмотров 16Месяц назад
This video presents a "probabilistic" version of the problem of fitting \theta in a model f(x,\theta) to fit pairs of training data (x_i, y_i) with y_i\in {0,1}, that is, binary classification. The "deterministic" version is discussed in the video ruclips.net/video/0F5ZTHwWqCU/видео.html , previous to this one, which you might wish to watch. The objective here is for the model to estimate the p...
Double integrator: trial-and-error controller tuning [1: PD proportional-derivative] empirical PIDs
Просмотров 108Месяц назад
This video discusses the intuition behind tuning a PD controller for a `double integrator' type process (mass motion with small, negligible friction). The motivation for studying this process has been addressed in the video ruclips.net/video/EWHgTP5XCQM/видео.html , since motion control is an important problem in practical applications. Double-integrating behaviour assumes friction is negligibl...
Double-integrator control (1): motivation (position control, force actuator, cascade control)
Просмотров 78Месяц назад
This video discusses the relevance in engineering practice of studying the control of a `double integrator' system, transfer function 1/s^2. It is the first of a 7-video case study (forthcoming as of today). Indeed, the motion of a mass M\frac{d^2p}{dt^2}=F has such dynamics, if there is no friction... and, well, in technological applications of motion control one should try to make such fricti...
Model fitting for classification (1): deterministic supervised version, problem statement
Просмотров 18Месяц назад
This video poses the problem of fitting some parameters \theta in a model f(x,\theta) to fit pairs of training data samples (x_i,y_i) with y_i in {0,1}, that is, binary classification. The problem can be deterministic (dog/not-dog) or random (probability of having a certain genetic mutation when some marker appears in a blood test). This video discusses the deterministic problem, presenting the...
Force estimation uncertain mechanical system: h2-hinf-musyn performance, time domain [4/4]
Просмотров 37Месяц назад
This video is the conclusion of the case study of the design of an estimator of an internal variable (observer) of a system with an uncertain model, which began in the video ruclips.net/video/nhLZCRbxJxM/видео.html (modeling), continuing in ruclips.net/video/lHEG0O50hPk/видео.html (generalized plant and optimal design h2, hinf, mu) and in ruclips.net/video/6loYlE9IMwo/видео.html (frequency anal...
Gaussian Processes: covariance between position and speed (2), example, prediction
Просмотров 1132 месяца назад
This video uses position/velocity joint covariances from a Gaussian process to make velocity predictions given position measurements in a numerical Matlab example. The second part of this example discusses how to incorporate mixed measurements of position and velocity to make statistical predictions of both position and velocity (interpolation). The variances and covariances themselves are calc...
Force estimation uncertain mechanical system: h2-hinf-musyn performance analysis in frequency [3/4]
Просмотров 412 месяца назад
This video continues the case study of the design of an ``estimator of an internal variable'' (observer) of a system with an uncertain model, which began in the video ruclips.net/video/nhLZCRbxJxM/видео.html (modelling), continuing in the ruclips.net/video/lHEG0O50hPk/видео.html (eneralized plant and optimal design h2, hinf, mu). Formally, the theory pursues guarantees in the frequency domain; ...
Force estimation in an uncertain mechanical system: h2, hinf, musyn Matlab example [2/4]
Просмотров 772 месяца назад
Force estimation in an uncertain mechanical system: h2, hinf, musyn Matlab example [2/4]
LFT modelling of a system with uncertain damping for force estimation [robust control] [1/4]
Просмотров 682 месяца назад
LFT modelling of a system with uncertain damping for force estimation [robust control] [1/4]
Gaussian Processes: covariance between position and speed (1), example
Просмотров 572 месяца назад
Gaussian Processes: covariance between position and speed (1), example
Feedback linearization/decoupling: two-input two-output example (hand-made, no Matlab)
Просмотров 742 месяца назад
Feedback linearization/decoupling: two-input two-output example (hand-made, no Matlab)
Phugoid mode dynamics: equilibrium, linearization, stability (simplified 2nd order equations)
Просмотров 572 месяца назад
Phugoid mode dynamics: equilibrium, linearization, stability (simplified 2nd order equations)
Hidden tiger 7: recursive Bayes formula (simulation, Matlab)
Просмотров 452 месяца назад
Hidden tiger 7: recursive Bayes formula (simulation, Matlab)
Robust stability margins [robstab, wcgain, robgain]: 2nd order system with uncertain damping, Matlab
Просмотров 813 месяца назад
Robust stability margins [robstab, wcgain, robgain]: 2nd order system with uncertain damping, Matlab
Aircraft phugoid mode: simulation, animation code (simplified equations, Matlab ode45)
Просмотров 823 месяца назад
Aircraft phugoid mode: simulation, animation code (simplified equations, Matlab ode45)
Hidden tiger 6: RECURSIVE Bayes formula, any number of roars (proof)
Просмотров 363 месяца назад
Hidden tiger 6: RECURSIVE Bayes formula, any number of roars (proof)
phugoid mode: simulation/animation examples, simplified flight dynamics, Matlab
Просмотров 1073 месяца назад
phugoid mode: simulation/animation examples, simplified flight dynamics, Matlab
Maximum volume ellipsoid inside polyhedron and other ellipsoids: 2D example, Matlab (LMI/SDP)
Просмотров 873 месяца назад
Maximum volume ellipsoid inside polyhedron and other ellipsoids: 2D example, Matlab (LMI/SDP)
Sampling Gaussian processes with observations (sampling the posterior), Matlab example
Просмотров 643 месяца назад
Sampling Gaussian processes with observations (sampling the posterior), Matlab example
Distance between ellipses: semidefinite programming, linear matrix inequalities [SDP/LMI]
Просмотров 653 месяца назад
Distance between ellipses: semidefinite programming, linear matrix inequalities [SDP/LMI]
Time response, RCR circuit: pulse train, Laplace transform techniques for circuit analysis
Просмотров 293 месяца назад
Time response, RCR circuit: pulse train, Laplace transform techniques for circuit analysis
Sampling Gaussian processes (realizations of stochastic process): Matlab example
Просмотров 734 месяца назад
Sampling Gaussian processes (realizations of stochastic process): Matlab example
why do control theorists put input disturbance as disturbance instead of output disturbance? input disturbance means that the actuation that you are giving the system doesnt happen as wished and this is considered a hardware error in real life and the control algorithms are not expected to handle that before output disturbances. output disturbances are realistic and should be handled before input disturbances, input disturbances are usually handled with fault detection of the hardware because usually control algorithms cant handle it
Thanks for your comment. You shouldn't take the word "input" literally. What you are referring to is an "actuator hardware fault" which, indeed, may be catastrophic for a control algorithm. What I understand as input "disturbance" is, say, an abstraction/simplification of a wind gust on a drone, opening your fridge's door, opening the faucet to drink water from a level-controlled tank... let me explain: you have a manipulated "actuator input" variable that can exert, say, a force on something you are moving in the direction and magnitude you wish... that's good; however, other guys may also be exerting unexpected/unmodelled forces (wind on a drone, augmented friction on a mechanical system, somebody pushing...) the end result is that the resultant force is not what you think it will be, and the difference is abstracted in the concept of "input disturbance". There is no "hardware fault" in there: on the contrary, your drone control must be there in order to avoid the drone drifting because of air currents and propeller miscalibration. In general, you may be providing a "manipulated, known" amount of "power" or "inflow" to move/heat/charge some system but the resultant power is not 100% what you thought you were providing; no problem because you get informed of that situation with sensing, nothing is wrong/faulty there: if your sensors detect that the drone is moving left when you thought it should remain motionless, your controller will react and push it rightwards just a little, in order to compensate for that "unknown thing", i.e., disturbance that seems to be moving it. No fault is happening in your propellers, it's just the wind. So, "input disturbance" is the "theoretical abstraction" of these issues when we are not interested in the actual "physics" or "technological detail" of what is causing them/how they happen: the most simple way of simulating the above kind of events to validate a PID behaviour is to add, say, a step on the input side, to see how the PID reacts to compensate for it.
@@ASalaControlEN drone: input disturbance: the motors dont go to the rpm set by the controller output disurbance: wind or a push on the drone out of position fridge: input disturbance: the cooling circuit does not give the cooling it is supposed to output disturbance: opening the door level controlled tank (assuming constant flow out of tank, controlled by water being added): input disturbance: the water being added is not what is expected by the controller output disturbance: opening faucet to empty faster or less flow out of the tank input: actuation output: result input disturbance: error on the actuation output disturbance: error on the result
Dear Rezah, Well, it seems that what I call "manipulated input" or "manipulated actuator" you name it, plainly, "input". And "everything else", you name that as "output". Well, if that's what you understand, that's not what I understand... No problem, we have different opinions, but we can live on our lives happily. My opinion in systems-theory jargon: INPUT: anything that can change the "internal state/energy/mass" of the process I am interested in controlling. There are TWO classes of inputs: the "manipulated ones" in which I can decide its value (manipulated actuation) and the "non-manipulated inputs", which come in as they wish and I must counteract. OUTPUT: what my sensors tell me about the internal state/stored energy/stored mass in my process. Then, in "generic systems theory" there is no such thing as "output disturbance". Disturbances may affect internal states in many ways, so we need to discuss controllability, observability, etc. for each input and sensor. Now, terminology in "single-input single-output process control simplifications" of the above general setup: INPUT DISTURBANCE: any "disturbance input" whose effect is (maybe approximately) equal to that of my "manipulated input"... any "external force" to my drone, any "thermal power drain" in my fridge, etc. OUTPUT DISTURBANCE: any "disturbance input" whose effect on my output of interest might be "faster" than that of my actuator, of which affects other subsystems/states different to those that my actuator is able to change, and important for my control tasks (target motion in tracking, measurement noise, ...). If my system is stable, slow input disturbances can be converted to output ones via a block diagram transformation. Fast output disturbances cannot be converted onto input ones. But, as I said, we are not starting a war here... Just note that classifying everything into "either input or output" is a simplification just as naming a color "either black or white"... there are "grey" things.. and in full-fledged system theory there are inputs, states, outputs, and controllable subsets of states for a given input, and observable subsets of states for a given sensor, and quantitative measures of controllability and observability... so there are many terminology nuances which are needed for a correct formal analysis apart from "input" versus "output". Best regards.
@@ASalaControlEN your definition is so complicated 🙂 it was very interesting to read how theorists view things, if anything that affects the internal states is an input disturbance isn't everything an input disturbance? also when you put the disturbance in front of the system in the block diagram, that is the input of the system, which is the actuation signal anyway, we disagree, no war, in the middle east we argue about everything but as long as there is no insults, everyone is friends
" if anything that affects the internal states is an input disturbance isn't everything an input disturbance?" In an abstract sense, yes: disturbances are always "inputs" to a system. The actuation signal is "just one of the possible inputs" affecting the energy/mass balances of my process. Disturbances "added at the input" or "added at the output" of block diagrams are simplifications for a first approach to testing PID control performance. And, yes, you have many more important issues to discuss in middle East than what is the meaning of "input". Best wishes, my friend.
why not make an example? make a system and control it...
Thanks for the comment! This is part of a case study, with 7 videos planned... But it'll take some time to complete and I have other videos with other topics in publication queue. It's the first one with just a bit of "motivation" towards understanding what might mean in "practice" what we'll do in next videos when devoting a lot of time to theory and simulation with the transfer function 2/s^2. Nevertheless, I'm a theory guy so the forthcoming videos will deal with ode45 simulations, pole placement, Laplace transform manipulations and the like. Actual "motion control" equipment will be for sure better presented in websites and YT channels of commercial companies in the area, I guess. Spoiler: motion control with reducing gears, hydraulics, etc. is better modelled with 1/s (kinematic control) than with 1/s^2 (dynamic control)... Keep tuned !-)
Thanks for the video. What happens to the pressure variable inside the tank?
I am not modelling pressure. So, this extremely simplified model is intentionally useless to compute pressure drops and pumping power needs: I am just modelling thermal energy balance under incompressible and constant specific heat assumptions. Regards!
thanks for making this video sir
Thank you for the comment. Best, Antonio.
it's better than nothing but it is still assuming the system is a 2nd order system, if the system is not 2nd order which is the case if you cant model it correctly with a 2nd order the whole concept falls
Indeed, you are right, thanks for the comment. Of course, this is a "toy example": a system with a single uncertain real parameter, plus the fact that it is in "open loop", which makes things even simpler. The true reach of uncertainty descriptions in robust control is usually apprehended in closed-loop configurations, also adding some "ultidyn" (uncertain LTI dynamics) with no prescribed order in order to encompass that "unmodelled dynamics" in the uncertainty description, or using small-gain results to probe robustness even in front of sector-bounded nonlinearities... In summary, this video is just a first glance to the idea, oriented to students that were taught what damping and overshoot is, in order to motivate them towards the interest of more ellaborate approaches, Regards!
A seasoned experienced Electronics Technician can breadboard and explain it's workings and troubleshoot the circuit using simple 'algebra and trigonometry' without using Laplace jargon and complex mathematics, using calibrated, oscilloscopes, high quality parts, voltmeters, ammeters, and even with the aid of a spectrum analyzer, Vector Network Analyzer etc...etc... I have great respect for Engineers and Physicist who can derive equations from complex theory, using mathematical software, and predict the behavior of circuit designs, and apply it to a design to practicality in the real world.
Thanks for commenting... and, yes, an experienced technician can do many things... and often be faster than an engineer in doing them... but somebody must invent/define what "phase angle" is, and what "spectrum" is before building the first spectrum analyzer, so everybody is needed: someone must know Maxwell equations to pass them to the next generation but he might have no idea on what a "ground wire" in a home is, and vice-versa, a technician can set up your antennae, fiber, grounding, etc. without knowing who were Laplace and Maxwell , and in a much better way than a Physicist!. Thanks God, all flavours of technical knowledge have its role. Regards, A. Sala.
@@ASalaControlEN my fav sinusoidal waves are photons, may I offer these tidbits from the Popcorn Model of Nature's Reality. This is in the study of the Harmonics and the Harmony of Our Universe in the context of Everything: so, lets use a metaphor where 1 musical note, (*) , represents Nature's Reality; This note, (*) , represents the true existence of Nature's reality. This is the realm of the lord, the almighty GOOD (not a religion but an attitude). The real note in which everything resides. What follows are just harmonics of the supreme existence of reality. 1st harmonic of reality (hor)* the human mind and the MotherVerse. 2nd harmonic of reality * commonly referred to as our universe and where electromagnetic radiative force is dominant. 3rd hor * dark matter, the strong nuclear force dominates. 4th hor * the weak nuclear force dominates. 5th hor * gravity, where the popcorn really explodes. 6th hor * time, the here and now where the rubber meets the road. The 3rd, 4th, and 5th combine to create Dark Energy. This not everything. Undescribed harmonics extend, ad infinitum, above and below the note (*). The harmonics show that space that appears empty is never in fact empty. Between Nothing and Everything is Something :)
Don't do this stuff, but thanks, anyway. Physics nerd.
Thanks for your comment... From me, wannabe nerd, to actual nerd: if you are in particle physics, this is just a toy problem compared to Einstein, Dirac and the like whose intricacies I fail to comprehend. By the way, you've got quite an eclectic/unconventional channel: pride, Socrates, physics... thumbs up!.
@@ASalaControlEN It's quite nice and I taught myself basic electronics when I was 13. It's ALL connected, one way or another.
thank you very much
Glad it helped ;-)
10:10
Concise but intense 🙏
@@ASalaControlEN Thank you for your efforts
Amazing!!!!! Thank you very much for sharing this splendid content.
You are welcome. Thanks for the comment.
Thank you : 3 Helped a lot
I'm glad to be helpful. Thanks for commenting! Just added a link to the `matrix form' video in the description.
Nice example, thanks!
You are welcome!
Nice video, bro! Keep it up :)
Thanks 🙏 Gracias
My brain stops braining
Wow... Maybe power off, reboot and underclock your CPU at 0.75X . 😵💫