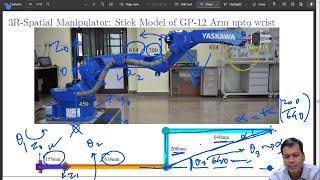
Dynamics of an Industrial Serial Robot using Newton-Euler (NE) Approach
US
Войти
Fundamentals of Inverse Kinematics of an Industrial Robot
1:05:17
Inverse Kinematics of a 6-DoF Industrial Robot (Yaskawa GP12)
58:52
Lecture 24 - Newton-Euler method
23:40
Fenerbahçe vs. Man. United: Extended Highlights | UEL League Phase MD 3 | CBS Sports Golazo - Europe
10:00
FlightReacts WARRIORS at TRAIL BLAZERS | FULL GAME HIGHLIGHTS | October 23, 2024!
24:49
Saying Goodbye to Her Little Brother for Good! *emotional*
20:03
Dynamics of an Industrial Serial Robot using Newton-Euler (NE) Approach
Arun Dayal Udai
Подписаться
8 тыс.
Скачать
Готовим ссылку...
Просмотров 4,6 тыс.
0
0
Добавить в
Мой плейлист
Посмотреть позже
Поделиться
Поделиться
HTML-код
Размер видео:
1280 X 720
853 X 480
640 X 360
Показать панель управления
Автовоспроизведение
Автоповтор
Опубликовано: 26 окт 2024
Комментарии • 1
Следующие
Автовоспроизведение
1:05:17
Fundamentals of Inverse Kinematics of an Industrial Robot
Arun Dayal Udai
Просмотров 1,5 тыс.
58:52
Inverse Kinematics of a 6-DoF Industrial Robot (Yaskawa GP12)
Arun Dayal Udai
Просмотров 9 тыс.
23:40
Lecture 24 - Newton-Euler method
NPTEL-NOC IITM
Просмотров 11 тыс.
10:00
Fenerbahçe vs. Man. United: Extended Highlights | UEL League Phase MD 3 | CBS Sports Golazo - Europe
CBS Sports Golazo - Europe
Просмотров 389 тыс.
24:49
FlightReacts WARRIORS at TRAIL BLAZERS | FULL GAME HIGHLIGHTS | October 23, 2024!
FlightReacts
Просмотров 262 тыс.
20:03
Saying Goodbye to Her Little Brother for Good! *emotional*
The Anazala Family
Просмотров 2,5 млн
21:01
Every TikTok I've Ever Liked
Markiplier
Просмотров 2,4 млн
25:10
Lecture 23 - Introduction to robot dynamics and Lagrange-Euler method
NPTEL-NOC IITM
Просмотров 13 тыс.
54:46
Fundamentals of Forward Kinematics of an Industrial Robot
Arun Dayal Udai
Просмотров 652
54:56
Lec 13 Newton-Euler Formulation for Serial Chains
NPTEL - Indian Institute of Science, Bengaluru
Просмотров 2,6 тыс.
6:42
Modern Robotics, Chapter 8.1: Lagrangian Formulation of Dynamics (Part 1 of 2)
Northwestern Robotics
Просмотров 142 тыс.
11:03
You don't really understand physics
Ali the Dazzling
Просмотров 171 тыс.
5:53
Modern Robotics, Chapter 8.3: Newton-Euler Inverse Dynamics
Northwestern Robotics
Просмотров 37 тыс.
8:40
AMR Segment 3 Video 3 Wheeled Kinematics Wheeled Locomotion
Thaddeus Roppel
Просмотров 4,6 тыс.
55:28
Dynamics of Robotic Manipulators - Part 1
Ali Raza
Просмотров 20 тыс.
15:23
7 Ways to Make a Conversation With Anyone | Malavika Varadan | TEDxBITSPilaniDubai
TEDx Talks
Просмотров 25 млн
00:33
same tricks, two different 🏍️ #moto #trialsbike #stuntbike
Red Bull USA
Просмотров 2,6 млн
00:32
ИСТОРИЯ ПРО ШТАНЫ #shorts
Dragon Docx
Просмотров 257 тыс.
00:33
Как Валя Карнавал сводит парней с ума? Полный ролик в ВК видео #отношения #психология #валякарнавал
Психолог Вероника Степанова
Просмотров 266 тыс.
00:54
爆笑電梯整蠱!今天這個妹子的自我防護意識我給100分!
整个路人
Просмотров 14 млн
13:02
ДЖИМЕН ВСЕХ СПАСЁТ ! | Сюжет skibidi toilet 77 (part 4)
LIGLEY BEST
Просмотров 92 тыс.
01:00
Только ЕМУ это удалось
БЕЗУМНЫЙ СПОРТ
Просмотров 1,5 млн
00:23
ITZY 예지한테 AI 메이크업하기💖 #shorts
LeoJ Makeup
Просмотров 2,7 млн
00:18
Ванька пошел!!!! 🥰
Денис Кукояка
Просмотров 562 тыс.