Universal Robots Pick and Place using subprograms (2019)

HTML-код
- Опубликовано: 15 июл 2024
- Tomi Palomäki showing you how to make simple pick and place program using the Universal Robots Polyscope interface.
TUTORIAL
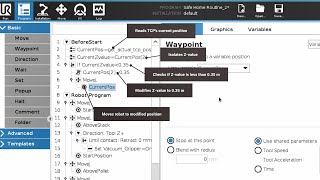
🙈 MoveJ in drop program should be MoveL🙈
In this video, you will learn:
- How to program universal robots
- How to make pick and place program by using subprograms.
Homepage - www.tomipalomaki.fi
RUclips - / smirnoff59
Twitter - / palomaki_tomi
Linkedin - / tomipalomaki
Instagram - / tomi_palomaki
Tiktok - / tomipalomaki
#universalrobots
#universalrobotsprogramming  Наука
Наука








Hi, why you chose MoveJ for Drop program? If we have some straight actions/moves, such as pick and drop, isn't it better to use MoveL?
Thanks!
You are absolutely right 👍 Thanks for pointing it out.
I added correction to description. Thank you 👍
@@tomipalomaki no problem, thank you! :)
Thank you so much it really help me as a beginner🙂☺👍
Thanks for this video, it is helpful. please how do I add object to the work space, in case I want to do grinding or object to pick. Thanks in advance
Thank you for this video
Could you make a video about programing counter loop?
Is there any possible way to put trajectory data from Matlab into the program? It seems like that you have to program every waypoint including joint positions, velocitys and accelerations manually.
Hi, In UR robot programming, how to know which instruction will be execute next ? if programm is quite big
Hi Tomi, I have been following all the steps of your video until a problem has come up in the steep you made in 3.48 minute of your video. When I click on Set Waypoint (go_home call) the folowing message appears: The Robot Cannot Proceed with the Normal Operation: Power off. And makes me go to initialization screen. Could it be a problem related to the instalation file? I hope you can help me. Thank you very much in advance.
Graet video !
Could you recomend to my some magnetick senzor for "UR 3", please ?
thnank you man !
Thank you for the comment.
What is your application where you need it?
What you need to detect?
With magnetic sensor you can detect Angle, Position, Speed and Direction of magnetic field.
please post a video on how to create a safe home routine. thanks in advance!!
Thanks for the comment. I think I will do that 👍 Do you have any specific situation where to return home? Should I do simple or complex home routine?
Tomi Palomäki Thanks Tomi, a simple one is good enough for a biginner like me😅
Ok. Perhaps i do couple videos about it, a basic one and little bit advanced how to use that same structure for more complex safe home routine.
Tomi Palomäki That will be a big help!! kudos to you!!
Tomi, Hello, I need help, I have an UR5-e I have an application where I'm boxing parts, I'm using the palletizing wizard, not a problem so far, the issue is when I try to turn the tool, 180 dgrees every other row, I can't find a command to do that, could you please help?
Thanks in advance.
Cpt.Z
I'll try to test how it would be possible and I'll let you know 😊
@@tomipalomaki Thank you Tomi, I appreciate the help
Hi.. Can you tell me from where I can install this polyscope?
www.universal-robots.com/download/
Select robot type -> cb- or e-series
Type of download -> software
Type of software -> offline simulator
Select Operating system -> linux or non linux
In this video I installed linux version to virtual machine.
Hanzhen harmonic drive gear , mechanical gear reducer , over 30 years experience
would you make a video for 'if else' command
Good idea i will do that 👍
Can u do a palletizing robot program....
I will put it on my video list 👍
Done!