Manipulability and Optimizing Joint Velocity, Intro2Robotics lecture 25

HTML-код
- Опубликовано: 21 авг 2024
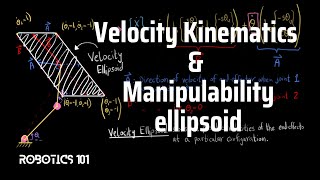
- Lecture 25 finishes our exploration of inverse velocity on a serial robot manipulator. If there are more DOF than 6, the system is over determined, so we provide a method for finding the optimal joint velocities to achieve a desired end-effector velocity. We also explore how to generate motion in the null-space of the Jacobian, and compute the "manipulability", a measure of how close the robot is to a singularity.
The handout for this is located in the worksheets folder of uofh-my.sharep...
Full Playlist "Intro to Robotics": • Intro2Robotics Lecture...








You got an asmr voice, I listen to Manipulability and Optimizing Joint Velocity every day before sleeping
I can finally visualize what is manipulability .. Thank you so much
good work
it was really helpful
I have forward & inverse kinematics (ruclips.net/video/TPjclVs4RIY/видео.html) , but dynamics is another course. Maybe next year.
Can you tell me the software you simulate the robot manipulator
Mathematica. You can make your own: demonstrations.wolfram.com/CommonRobotArmConfigurations/
@@AaronBecker thank you