3) Inverse Kinematics

HTML-код
- Опубликовано: 3 окт 2024
- In this video, we'll dive into the fascinating world of inverse kinematics, a powerful tool used in robotics, animation, and virtual reality to control the movement of complex structures with precision and efficiency. We'll start by defining the concept of inverse kinematics and its main applications.
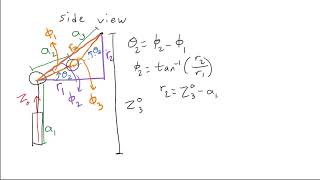
Then, we'll explore two main approaches to solving inverse kinematics problems: geometric and analytical. In the geometric approach, we'll use trigonometry and vector algebra to derive equations that relate the position and orientation of the end-effector (e.g., a robot gripper or a character's hand) to the angles of the joints in the kinematic chain (e.g., the robot's arm or the character's limbs).
For more information, look at the drive link with documents: drive.google.c...






![FendiDa Rappa - Clock Dat ft. Shamar Marco [Official Music Video]](http://i.ytimg.com/vi/3NBU8KHdxYY/mqdefault.jpg)

part 4 plz eng omar
ان شاء الله قريب