Cable Driven Input Device to Telecontrol a Franka Emika Robot

HTML-код
- Опубликовано: 8 сен 2024
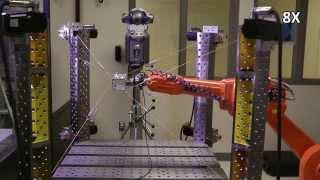
- This video shows the use of a parallel cable robot with 4 cables and 3 DOF as a cable driven (haptic) input device to telecontrol a Franka Emika Robot.
More information can be found here: www.imt.uni-st...







![Наследники. Как живут сыновья Путина и Кабаевой | Фильм центра «Досье» | Putin's kids [English subs]](/img/1.gif)
very nice!
how do you like the STM32 ESC Discovery kit?
We like it very much. It's quite easy to use and versatile :)
@@masimt2778 Nice, ya i like how cheap they are and have a surprising amount of IO. Did you publish the project as open source? I like the adapter boards you made for the boards.
@@Ender_Wiggin Thank you! So far it is not open source, we are currently working on a new version of the adapter boards to be able to use even more functions of the kit simply via screw terminals on the adapter pcb
Nice robot, can you please tell me why don't all the drums have helicoidal grooves in them ?
Thank you! :-) If a certain distance is maintained between the drum and the first cable pulley, the deflection angle between the cable and the drum is rather small. This ensures clean winding of the cable without overwinding. We have made tests with different drum designs with and without helicoidal grooves since drums without grooves are easier to manufacture (e.g. out of aluminium instead of PLA).
I see, thank you very much. I have some questions though, have you tried using geared dc motors ? Will the platform still be easy to move and interact with ? I suppose not due to higher inertia and static friction of the gears. Also i would like to ask you about the cable distribution system. I've seen some designs that have a mechanism that makes it easier to wind the cables, have you tried it if yes, do you think it's an overkill ?
No we wanted to use drives without gearbox since we wanted to achieve good backdrivability. In case of larger cable robots, I see clear benefits of mechanisms that ensure proper spooling of the cable on the drum, however due to limitations of space in our case we did not use such mechanisms @@OmarAissani-n1
@@masimt2778 thanks a lot man i appreciate it. may i have your contact information ? i want to build one myself i would like to collaborate and benifit from your experience
@@OmarAissani-n1 You're welcome! You can find my contact information here: www.imt.uni-stuttgart.de/institut/team/Schaefer-00001/
can i please ask you some questions about the parallel cable robot
sorry for the late reply. Just ask here, hopefully i can answer your questions ;)