chào anh, a xài bản linux mấy để cái ROS vậy anh? em cài hoài k được.. Với em đang nghiên cứu SLAM để làm đề tài tốt nghiệp, k biết anh em có thể giao lưu để học hỏi được k anh?
Tran Trung cảm ơn bạn đã xem video này nhé. Trước hết là tại vì mình làm đề tài này cũng lâu rồi nên bản ROS bây giờ chắc cũng nâng cấp lên nhiều lắm, tuỳ vào một version thì sẽ tương thích vs một phiên bản linux khác nhau. bạn xem thử máy của bạn tương thích vs bản nào thì bạn cài chứ hồi trước mình cũng thử nhiều lần mới được đấy. chúc bạn hoàn thành tốt đề tài nha. nếu bạn có thêm thắc mắc gì thì mình có thể nghiên cứu cùng nhau ;-)
vâng, em cảm ơn anh.. nhiều cái em thắc mắc quá, với em muốn hỏi, cái chương trình ROS nó conect với mạch VDK qua UART phải k anh? ví dụ em sử dụng k phải là kinect mà là cảm biến hồng ngoại bình thường thì và xài board arduino thì em gửi lên máy tính bằng cổng COM, trong cái ROS nó làm sao nhận được anh? hay mình phải lập trình trong ROS nữa?
Ý kiến của em cũng hay, nhưng anh chưa thử nên a cũng ko dám chắc được. Giả sử ROS đã kết nối là lấy thông tin đó được rồi nhưng sẽ có thêm một vấn đề nữa để giải quyết là vấn đề timing. Bởi vì dữ liệu laser của em rất lớn và phải update liên tục cho ROS xử lý. Nếu ko đảm bảo được tính realtime thì anh e rằng robot sẽ ko chạy mượt mà được. Nhưng dù sao thì vẫn đáng để mình thử mà. Nếu thành công thì chú robot của em có giá trị hơn đấy, bởi vì nó đã giảm được cái camera tốn tiền kia rồi :0
tùy vào mỗi hệ thống thì nó sẽ có một bộ thông số khác nhau nên bạn phải dựa vào thực nghiệm nhiều mới tính được nhé. Mình cũng chỉnh các thông số đó bằng thực nghiệm mà :)
Anh cho em hỏi em chạy roswtf ra lỗi như này là sao ạ? Với cái map_update cũng bị lỗi nữa. Em cảm ơn ạ. ERROR The following nodes should be connected but aren't: * /move_base->/move_base (/move_base/global_costmap/footprint) * /move_base->/move_base (/move_base/local_costmap/footprint)
Cho em hỏi là Cái này mình điều khiển nó quét bản đồ thủ công đúng không anh? Nếu được cho em xin tài liệu tham khảo thêm với ạ: levantronghuu243@gmail.com
Em chào anh. Em là sinh viên trường mình và em đang làm luận văn liên quan đến đề tài này. Anh có thể cho em xin file báo cáo luận văn để tham khảo không ạ? Em cảm ơn anh. Gmail của em: mr.hhha@gmail.com
Em chào anh, hiện tại em đang làm luận văn về đề tài này nhưng gặp lỗi lúc con robot chạy tới gần goal, nó xoay hoài vẫn không reach được goal. Anh có thể cho em tham khảo báo cáo đề tài được không anh? email của em là phuocnguyenbk15@gmail.com. Em cảm ơn anh.









Hi. I have a doubt. Did you use only one kinect sensor for mapping? Can I have a look on your codes?
Anh ơi cho em hỏi làm sao mình có thể add được mô hình robot vào trong gazebo để mô phỏng vậy anh?
chào anh, a xài bản linux mấy để cái ROS vậy anh? em cài hoài k được.. Với em đang nghiên cứu SLAM để làm đề tài tốt nghiệp, k biết anh em có thể giao lưu để học hỏi được k anh?
Tran Trung cảm ơn bạn đã xem video này nhé. Trước hết là tại vì mình làm đề tài này cũng lâu rồi nên bản ROS bây giờ chắc cũng nâng cấp lên nhiều lắm, tuỳ vào một version thì sẽ tương thích vs một phiên bản linux khác nhau. bạn xem thử máy của bạn tương thích vs bản nào thì bạn cài chứ hồi trước mình cũng thử nhiều lần mới được đấy. chúc bạn hoàn thành tốt đề tài nha. nếu bạn có thêm thắc mắc gì thì mình có thể nghiên cứu cùng nhau ;-)
vâng, em cảm ơn anh.. nhiều cái em thắc mắc quá, với em muốn hỏi, cái chương trình ROS nó conect với mạch VDK qua UART phải k anh? ví dụ em sử dụng k phải là kinect mà là cảm biến hồng ngoại bình thường thì và xài board arduino thì em gửi lên máy tính bằng cổng COM, trong cái ROS nó làm sao nhận được anh? hay mình phải lập trình trong ROS nữa?
ah, không biết a còn giữ file luận văn k anh? có thể chia sẻ cho em để em làm tài liệu tham khảo không ạ?
Ý kiến của em cũng hay, nhưng anh chưa thử nên a cũng ko dám chắc được. Giả sử ROS đã kết nối là lấy thông tin đó được rồi nhưng sẽ có thêm một vấn đề nữa để giải quyết là vấn đề timing. Bởi vì dữ liệu laser của em rất lớn và phải update liên tục cho ROS xử lý. Nếu ko đảm bảo được tính realtime thì anh e rằng robot sẽ ko chạy mượt mà được. Nhưng dù sao thì vẫn đáng để mình thử mà. Nếu thành công thì chú robot của em có giá trị hơn đấy, bởi vì nó đã giảm được cái camera tốn tiền kia rồi :0
vâng, mail của em là: trungcdt92@gmail.com. nếu được a P cho em xin báo cáo luận văn của a để a tham khảo với a!
How the robot knows its angular position ?
Bạn xài Gmapping hay Hector SLAM thế ^_^
Bạn ơi cho mình hỏi mấy file thông số .yaml trong thư mục param đề tài của bạn dc ko? Mình đang làm khóa luận tốt nghiệp đề tài tương tự. TKS :D
tùy vào mỗi hệ thống thì nó sẽ có một bộ thông số khác nhau nên bạn phải dựa vào thực nghiệm nhiều mới tính được nhé. Mình cũng chỉnh các thông số đó bằng thực nghiệm mà :)
I want to make this can you help?
Anh cho em hỏi em chạy roswtf ra lỗi như này là sao ạ? Với cái map_update cũng bị lỗi nữa. Em cảm ơn ạ.
ERROR The following nodes should be connected but aren't:
* /move_base->/move_base (/move_base/global_costmap/footprint)
* /move_base->/move_base (/move_base/local_costmap/footprint)
I want to make this
A có thể cho e xin số phone e gọi hoit a 1 vài khúc mắc không ạ. E sẵn sàng trả money a ạ. E làm đồ án đề tài này ạ a. E cảm ơn a
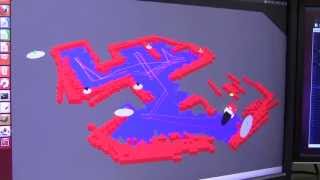
Cho em hỏi là Cái này mình điều khiển nó quét bản đồ thủ công đúng không anh?
Nếu được cho em xin tài liệu tham khảo thêm với ạ: levantronghuu243@gmail.com
Em chào anh. Em là sinh viên trường mình và em đang làm luận văn liên quan đến đề tài này. Anh có thể cho em xin file báo cáo luận văn để tham khảo không ạ? Em cảm ơn anh. Gmail của em: mr.hhha@gmail.com
e đang tìm hiểu đề tài này mà tìm tài liệu bí quá , a có thể cho e xin bài báo báo được không ạ
cuong30111999@gmail.com
e cảm ơn a
Em chào anh, hiện tại em đang làm luận văn về đề tài này nhưng gặp lỗi lúc con robot chạy tới gần goal, nó xoay hoài vẫn không reach được goal. Anh có thể cho em tham khảo báo cáo đề tài được không anh? email của em là phuocnguyenbk15@gmail.com.
Em cảm ơn anh.