@@supernova6553 ORB-SLAM2 is much better in my opinion. Now ORB-SLAM3 is out but I wasn't able to check that out. OpenVSLAM is another great example of such systems.
"well" it depends. You will increase loop closure detection success if you revisit the same area with the *same* point of view. The point of view is particularly important in forest, because even by moving 1 feet on the side, the visual features may appear very different because of the changing overlap of trees, branches and leaves. If it is a very windy day with a forest with a lot of leaves, it may increase this effect. Another challenge in this dataset was the lighting variation and shadows, only with SuperPoint I was able to detect the closure of the largest loop (50:05). A GPS was not used in this experiment, but it could have help to find loop closures.
What camera would you suggest for this process? There are a large variety of options on the wiki but I am not sure which one will suit my purpose the best. I am interested in real time mapping of forest stands to generate dense point clouds for TLS - like processing to derive inventory metrics.
So, have you used any additional information apart from the pictures that the camera is obtaining? This is, do you fuse the information that you obtain from the camera images with any other sensor information (maybe GPS or so)
Great video, thanks for sharing, could you guess about the computational time when this running in realtime? Specifically, in the last of trajectory when the map size is very large.
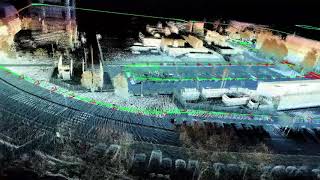
Don't remember exactly what was the computational time at the end, but it was under 1 second, which was the real-time limit set (memory management was enabled). You can see at 50:11 that the first part of the map is retrived from long term memmory to working memory to extend the map. After mapping, just before 55:11, we can see the map in working memory at that time, then I clicked on action to show the global map.
It was partly cloudy and a windy day (clouds were moving relatively fast). For visual odometry, done >10 Hz it was not really a problem. It is more the exposure change when switching from shadow to very sunny area (or vice-versa) that could cause odometry issues. For localization, it was indeed a problem, I tried many features and only SuperPoint was able to close the large loop. Look closely at the bottom left at 50:11, we can see the two images used for the loop closure. We can see one has shadows and sunlights (no clouds), while the other is completely in shadow (with clouds). The wind could also make odometry more difficult, as it would make the sunlights/shadows move on the ground when the trees are moving, thus making features used by odometry moving in the scene.
I have studied the instructions, installed the programs, but I do not understand what to do next. Sorry, I'm a little stupid ... Will you help me, please, write detailed instructions or a video on how I can run SLAM on my computer.
It depends what do you mean by real-time, here it means that images were processed in online fashion. I was seeing this on the laptop while walking. For the equipments used, the MYNT EYE S camera linked in the description and a XPS2019 laptop.
You can get windows binaries here: github.com/introlab/rtabmap/releases/tag/0.20.3. Check at 40:00 in the video for parameters used. The only difference is that you won't have access to SuperPoint features for loop closure detection with that release, but other default features should be ok if there is not too much illumination variance.









RTAB-Map has been one of the greatest SLAM systems I have ever seen. This is amazing to watch!
what are some other better or equally as good that you've seen?
@@supernova6553 ORB-SLAM2 is much better in my opinion. Now ORB-SLAM3 is out but I wasn't able to check that out. OpenVSLAM is another great example of such systems.
@@yusufdurkaya5890 better in what? ORB2/3 doesnt know to use odometry , occupancymap is not supported, no tools and unstable
Look who's back!!!
thank you so much for sharing the settings Mathieu!
Exceptionnel! Bravo Mathieu :-)
Awesome!, which PC did you use for it?
Is it possible to relocalization well in the forest? as everywhere looks the same.
"well" it depends. You will increase loop closure detection success if you revisit the same area with the *same* point of view. The point of view is particularly important in forest, because even by moving 1 feet on the side, the visual features may appear very different because of the changing overlap of trees, branches and leaves. If it is a very windy day with a forest with a lot of leaves, it may increase this effect. Another challenge in this dataset was the lighting variation and shadows, only with SuperPoint I was able to detect the closure of the largest loop (50:05). A GPS was not used in this experiment, but it could have help to find loop closures.
Impressive!!
What camera would you suggest for this process? There are a large variety of options on the wiki but I am not sure which one will suit my purpose the best. I am interested in real time mapping of forest stands to generate dense point clouds for TLS - like processing to derive inventory metrics.
It depends how large is the area to cover. Lidar may be preferred for fast coverage, if you are interested only in geometry.
So, have you used any additional information apart from the pictures that the camera is obtaining? This is, do you fuse the information that you obtain from the camera images with any other sensor information (maybe GPS or so)
Only stereo images and IMU from the camera
@@matlabbe The same camera had both sensors? Was it your phone or a different device?
@@pablodavidarandarodriguez163 this was with a Mynteye camera
Great video, thanks for sharing,
could you guess about the computational time when this running in realtime? Specifically, in the last of trajectory when the map size is very large.
Don't remember exactly what was the computational time at the end, but it was under 1 second, which was the real-time limit set (memory management was enabled). You can see at 50:11 that the first part of the map is retrived from long term memmory to working memory to extend the map. After mapping, just before 55:11, we can see the map in working memory at that time, then I clicked on action to show the global map.
Question: was it a sunny day or a cloudy day? Sunny with high varying contrasts would make the result more prone to tracking robustness issues no?
It was partly cloudy and a windy day (clouds were moving relatively fast). For visual odometry, done >10 Hz it was not really a problem. It is more the exposure change when switching from shadow to very sunny area (or vice-versa) that could cause odometry issues. For localization, it was indeed a problem, I tried many features and only SuperPoint was able to close the large loop. Look closely at the bottom left at 50:11, we can see the two images used for the loop closure. We can see one has shadows and sunlights (no clouds), while the other is completely in shadow (with clouds). The wind could also make odometry more difficult, as it would make the sunlights/shadows move on the ground when the trees are moving, thus making features used by odometry moving in the scene.
I have studied the instructions, installed the programs, but I do not understand what to do next. Sorry, I'm a little stupid ... Will you help me, please, write detailed instructions or a video on how I can run SLAM on my computer.
The easiest way is to downlaod the windows binaries with a supported camera, see github.com/introlab/rtabmap/releases
Where can I found this soft? It is realy important for me
See the link in the description
@@matlabbe I don" undesand how can I launch Slam...
Wow
How would you compare RTABmap with ORB-SLAM2?
You can check this paper for a comparison with standard datasets: introlab.3it.usherbrooke.ca/mediawiki-introlab/images/7/7a/Labbe18JFR_preprint.pdf
this is not real time right. if i do real time, what are the equipment and how accurate is localisation
It depends what do you mean by real-time, here it means that images were processed in online fashion. I was seeing this on the laptop while walking. For the equipments used, the MYNT EYE S camera linked in the description and a XPS2019 laptop.
Hi is possible have a demo code?
You can get windows binaries here: github.com/introlab/rtabmap/releases/tag/0.20.3. Check at 40:00 in the video for parameters used. The only difference is that you won't have access to SuperPoint features for loop closure detection with that release, but other default features should be ok if there is not too much illumination variance.
What dataset did you use?
I recorded it next to where I live.
the github pages link in description is broken
Fixed!