Kinematic Design Optimization of a Parallel Surgical Robot to Maximize Anatomical Visibility Via Mot
US
Войти
Dynamic Control of Cable Driven Parallel Robots with Unknown Cable Stiffness: A Joint Space Approach
2:19
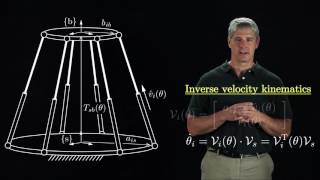
Modern Robotics, Chapter 7: Kinematics of Closed Chains
8:34
Bayesian Optimization Using Domain Knowledge on the ATRIAS Biped
2:48
Darling, I
04:14
exploring the history of minecraft all in one video
39:56
Quando Rondo - Life Goes On [Official Music Video]
02:19
Kinematic Design Optimization of a Parallel Surgical Robot to Maximize Anatomical Visibility Via Mot
ICRA 2018
Подписаться
3,1 тыс.
Скачать
Готовим ссылку...
Просмотров 919
0
0
Добавить в
Мой плейлист
Посмотреть позже
Поделиться
Поделиться
HTML-код
Размер видео:
1280 X 720
853 X 480
640 X 360
Показать панель управления
Автовоспроизведение
Автоповтор
Опубликовано: 27 окт 2024
Комментарии • 2
Следующие
Автовоспроизведение
2:19
Dynamic Control of Cable Driven Parallel Robots with Unknown Cable Stiffness: A Joint Space Approach
ICRA 2018
Просмотров 402
8:34
Modern Robotics, Chapter 7: Kinematics of Closed Chains
Northwestern Robotics
Просмотров 44 тыс.
2:48
Bayesian Optimization Using Domain Knowledge on the ATRIAS Biped
ICRA 2018
Просмотров 1,6 тыс.
04:14
Darling, I
Tyler, The Creator - Topic
Просмотров 341 тыс.
39:56
exploring the history of minecraft all in one video
aCookieGod
Просмотров 849 тыс.
02:19
Quando Rondo - Life Goes On [Official Music Video]
Quando Rondo
Просмотров 576 тыс.
12:26
I built a LEGO Video Game ARCADE...
The B3
Просмотров 436 тыс.
2:59
Micro Underwater Vehicle Hydrobatics: A Submerged Furuta Pendulum
ICRA 2018
Просмотров 2,2 тыс.
5:01
[RA-L/IROS] Anthropomorphic Rolling Contact joint with Kinematically Variable Torsional Stiffness
DYROS
Просмотров 7 тыс.
20:27
How to Improve Blender's UI - Andrew Price - Blender Conference 2024
Blender
Просмотров 73 тыс.
2:34
DELIGHT: An Efficient Descriptor for Global Localisation Using LiDAR Intensities
ICRA 2018
Просмотров 1,8 тыс.
2:27
Efficient Lockable Spring Ankle (ELSA) prosthesis
SLMC-EdinburghUni
Просмотров 19 тыс.
13:06
HUGE Magnet VS Copper Sphere - Defying Gravity- Will a Neodymium Magnet Float Inside?
Robinson Foundry
Просмотров 4,4 млн
2:41
Unsupervised Learning of Hierarchical Models for Hand-Object Interactions Using Tactile Glove
ICRA 2018
Просмотров 867
2:57
Realtime Planning for High-DOF Deformable Bodies Using Two-Stage Learning
ICRA 2018
Просмотров 462
3:00
Pairwise Consistent Measurement Set Maximization for Robust Multi-Robot Map Merging
ICRA 2018
Просмотров 1,3 тыс.
01:01
一把传统手工线锯的制作,简单易学,极致性价比 #woodworking
阿木爷爷 Grandpa Amu
Просмотров 1 млн
00:35
Теперь мы знаем, к чем стремится Динара #huga #хетагхугаев #детекторлжи
HUGA
Просмотров 67 тыс.
00:46
Распаковываю Детский Спиннинг-ручку! #shorts
RybakAS. Fishing and Traveling
Просмотров 762 тыс.
00:18
Ванька пошел!!!! 🥰
Денис Кукояка
Просмотров 909 тыс.
11:13
Comedy Club: Покушение перед выборами | Харламов, Иванов, Бутусов, Сафонов @ComedyClubRussia
Comedy Club
Просмотров 1,6 млн
00:59
ЭКСКУРСИЯ в ЗООПАРК (смешное видео, приколы, юмор, поржать)
Натурал Альбертович
Просмотров 1,8 млн
24:38
Новый УАЗ БУХАНКА! Вся ЖЕСТЬ! Вся ПРАВДА!!! Двигатель В ХЛАМ. ВСЁ В РЖАВЧИНЕ! СВАРКА, ШВЫ. ЭТО УЖАС.
Всё из за Метало Копа
Просмотров 317 тыс.
00:57
Ани Лорак круто перепела Уитни Хьюстон на МУЗЛОФТЕ😍
MUZLOFT
Просмотров 309 тыс.






![Quando Rondo - Life Goes On [Official Music Video]](http://i.ytimg.com/vi/eIf3fhMXAow/mqdefault.jpg)

