Calibration and accuracy validation of a FANUC LR Mate 200iC industrial robot

HTML-код
- Опубликовано: 24 мар 2013
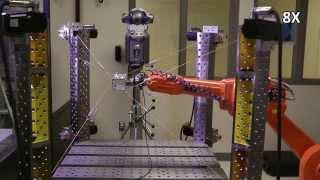
- This video shows excerpts from the process of calibrating a FANUC LR Mate 200iC industrial robot using two different methods.
In the first method, the position of one of three points on the robot end-effector are measured using a FARO laser tracker in 50 specially selected robot configurations (not shown in the video). Then, the robot parameters are identified using a mathematical procedure. Next, the the position of one of the three points on the robot's end-effector are measured using the laser tracker in 10,000 completely arbitrary robot configurations. The mean position error after calibration was found to be 0.156 mm, the standard deviation (std) 0.067 mm, the mean+3*std 0.356 mm, and the maximum 0.490 mm.
In the second method, the complete pose (position and orientation) of the robot end-effector is measured in about 60 robot configurations using an innovative method based on Renishaw's telescoping ballbar (dx.doi.org/10.1016/j.precision..., • QC20-W wireless ballba... ). Then, the robot parameters are identified using a mathematical procedure. Next, the position of one of the three points on the robot's end-effector are measured using the laser tracker in 10,000 completely arbitrary robot configurations. The mean position error after calibration was found to be 0.479 mm, the standard deviation (std) 0.214 mm, and the maximum 1.039 mm. However, if we limit the zone for validations, the accuracy of the robot is much better.
Conclusion 1. This is the most accurate robot we have ever calibrated. Recall that we measure the error in 10,000 completely arbitrary robot configurations. Nearly all other such accuracy validations are done in no more than 100 robot configurations, which are unlikely to include outliers.
Conclusion 2. The second calibration method is less efficient, but relies on a piece of equipment that costs only $12,000 (nearly ten times less than a laser tracker). Furthermore, if you are interested in improving the robot's accuracy in only a small zone, then the second calibration method is clearly a winner.  Наука
Наука








It's called a setting ball. It's a precision ball with a stem. In the part of the video you are referring to, we basically teach three positions with the robot - the positions of the three so-called "centre pivot" assemblies.
Kind of hard to see - what exactly does the operator put on and take off the three rods in the first minute and a half of the video? Like at the 1:17 moment for example?
Where did you purchase the table from? Is the black adaptor plate at the base of the robot there as the M10 screw size differs from the table holes? Does the table have any vibration isolation?
buildprotables.com/main_products.php