sorry to be off topic but does someone know a trick to log back into an Instagram account..? I stupidly lost the login password. I would love any tricks you can give me!
I am currently working on MPU9250, from scratch, for my rover to track location and orientation underground. This is my first time using such sensor and literally everything about this sensor, and this video is so helpful! I understood everything and made me understand the basics enough for me to make simple algorithms, maybe? I still need a lot of things to learn, but this series is so helpful. THANK YOU SO MUCH BRIAN!
Wow - this is really awesome. Great explanation, superbly prepared, this is one of the best tutorials I saw so far in terms of didactic methods and visualization of a complex topic.
it is the lesson that i need at the moment. i started to learn control to build my own flight controller. going through control theory, sensor fusion, kalman filter etc lessons i believe i will achieve my goal. thank you so much brian.
I felt that the lecture contained a massive amount of information and required some good deal of prerequisite knowledge. Does anyone else also feel the same way? If you do can you tell me how you covered that knowledge gap ?
When an object rotates in uniform circular motion, the acceleration is not tangent to the circle, but rather towards the center of the circle. The narration, together with the pictures, implied that the acceleration was tangential. That only happens if the object, in addition to traveling in a circle, changes its speed.
You are correct. In my head, I was envisioning the angular rate changing (or it accelerates the speed at which it rotates) then the acceleration would be in the direction I drew. However, my voiceover and the animation didn't match that description and I should have drawn the acceleration vector radially. Thanks for catching this!
This video helps me a lot!! But I was wandering that at 3:07 why could we measure the upward acceleration? Since the phone remained stationary on the table, the total force on it should be balanced and thus be zero. Therefore the phone should not experience any acceleration, right? hope somebody could answer that for me. Thanks!!
I had the same question. I think it has something to do with how accelerometers work. The sensor has a mass suspended with spring(s). The acceleration is calculated based on the compression of the springs. In the case where the phone is stationary, the mass will experience the force of gravity and compress the spring under it which corresponds to an upward acceleration.
Hi Brian, thanks for taking the time to make the videos, they're very helpful. But I was wondering if you could provide me with some references to the subject of system Identification methods (books or videos). Thank you in advance.
How do you do the down(gravity) estimation when the imu is moving and not stationary(4:10)? Is it even possible if i dont know the initial orientation of the sensor?
I don't know if I'm following your question exactly but let me answer what I think you're asking and please clarify if I'm wrong. NED and ENU are both coordinate frame conventions that are tied to the same reference (Earth). We could use either frame to describe a rotation but NED is more commonly used in aerospace. In this way, when an accelerometer is sitting on a table, the acceleration it feels is up, or a negative acceleration in the Down axis. And, East would be -accel (which is down) cross mag field. But if we were working in the ENU frame, then the upward acceleration would be positive since it's in the UP direction, and East would mag field cross accel (which is up). Did that make sense and did that answer your question?
Brian, I’m trying this in an airplane, but in a coordinated turns the sensors would read 0° roll as the gravity vector is pointing down (relative to the aircraft). How is this issue solved? Should I use a different fusion method?
Thanks for the nice video. I have a precision to bring about magnetic metals: hard irons keep a residual magnetic field after contact with a magnet (like a steel screw driver), whereas soft irons are attracted by magnets but they don't keep a field, like cast iron and many soft steel plates used in magnetic systems (transformer cores, pots around magnets, etc) Weirdly enough this is a mix of crystallography and quantum effects.
Nice video; but I would like to ask a question. Is there some equations/formula for these features how to estimate the position or how far a drone is traveled (would you give more information regarding this too please)? I just want to understand how to apply these on coding section later on, thank you.
The point of this video is to indroduce some of the topics youre asking for equations for.. coz giving eqiations wil just take too long. i think a good start for you would be to research the topics discussed such as quaterions and kalman filters 1st with that youll be able to get the mahoney and magwick filters.
(0:00 - 2:00) Introduction to the concept of orientation and different ways to represent a rotation such as roll, pitch, yaw, Direction cosine matrix, YZ, and quaternion. (2:00 - 4:00) Explanation of how to estimate orientation using a magnetometer and an accelerometer. The video explains how to measure the phone's acceleration and the magnetic field to determine the direction of gravity and north. (4:00 - 6:00) Discussion of the problems with the simple implementation of the orientation estimation, including the effects of linear accelerations and disturbances in the magnetic field. (6:00 - 8:00) Explanation of how to calibrate the magnetometer to correct for hard and soft iron sources that distort the magnetic field measurements. (8:00 - 10:00) Discussion of how to deal with corrupting linear accelerations by predicting them and removing them from the measurement, or by ignoring accelerometer readings that are outside of a certain threshold. (10:00 - 12:00) Introduction of the gyro to measure the angular rate of the system and explanation of how to estimate orientation for a rotating object using just the gyro. This process is called dead reckoning. (12:00 - 14:00) Discussion of the downsides of dead reckoning, including the need to know the initial orientation and the drift away from the true position due to sensor bias and high-frequency noises. (14:00 - 16:00) Explanation of how to use sensor fusion to combine the estimates from the accelerometer, magnetometer, and gyro to minimize their weaknesses and maximize their strengths. (16:00 - 18:00) High-level explanation of how the blending of the two solutions (accelerometer and magnetometer vs gyro) works in sensor fusion algorithms like the complementary filter or the Kalman filter. (18:00 - 20:00) Demonstration of how to implement the sensor fusion algorithm in MATLAB using the function ahrsfilter. (20:00 - 20:32) Conclusion and introduction to the next video, which will add GPS to the IMU and orientation estimate to improve the position obtained from the GPS sensor.
Any thoughts on the 9 DOF chip, LSM9DS1? Wouldn't implementing sensor-fusion be easier if it's all from one chip? For example, I saw another cool Processing project, but that too doesn't use the ST chip, instead the ADXL345.. "ADXL345 accelerometer breakout board + Arduino and Processing"
If you make the assumption that the magnetic field is pointing in the north direction (and a little down or up) then the down and mag vectors exist within the down/north plane. The cross product of two vectors produces a third vector that is perpendicular to both. So, in this case it would be perpendicular to down/North plane, which is either East or West. Per the right hand cross product rule, down X mag would produce a vector pointing East, and mag X down would produce a vector pointing West. Does that help?
time 6:19 the direction of the acceleration is not correct, at least misleading. Normally when we talk about the acceleration of rotation, it's talking about centrifugal force.
If the bar was rotating at a constant angular velocity then I agree that the accelerometer would report only the centripetal acceleration and it would point toward the center of rotation. But what I was trying to show (poorly) was that when the bar accelerates from stationary to some angular velocity, the majority of the acceleration that the sensor would see could be perpendicular to the bar. Imagine a really long bar with a sensor at the end. If the bar rotated only a fraction of a degree, there wouldn't be much rotation but the end of the bar could have moved up or down quite a long way. This is what the accelerometer is sensing here. But I should have also mentions that rotations also produce a component of acceleration that is along the radius of the rotation. Thanks for the comment!
any one can help me i am trying the same code in the vedio but i got an error Incorrect I2C device connected. Expected I2C addresses: [0x0C]. Detected I2C addresses: [0x68]. any one can help me plzz
It depended on youre prior knoledge ofc. Is a pi powerfull enough to do basic sensor fusion? Yes definatly. Can you build a basic imu on pi? Yes defo. But be warned this is a huge topic. E.g. theirs AI aplications for sensor fuaion and navigation that this talk doesnt cover. But i suggest ignor those till after you finished this topic 1st. Maybe youre wanting to build a simple imu aplication? if so i highly recommend the paul mcwhorter/toptec boy imu series... if you're already familiar with that, then you could add to his coding with a kalman filter, anddead reconing filters perhaos of maybe even make it a 10-12 dof with a gps. If you wanna learn in an introductory series way theirs a 53 part series on kalman filters that is well and truley excellent, sorry i can remember the tubers name but again im sure youll find it within 1 or 2 searches.
I need an urgent answer, please! I used MPU9250 to get the x, y, and z axes' values for the accel, mag, and gyro but I didn't know how to use them to calculate the angle of the sensor from the floor. please help! PS, very useful explanation in the video.





![BLACK BAG - Official Trailer [HD] - Only in Theaters March 14](http://i.ytimg.com/vi/Du0Xp8WX_7I/mqdefault.jpg)



As an engineering student, I cannot stress enough how grateful every one of us is for the existance of Brian Douglas.
sorry to be off topic but does someone know a trick to log back into an Instagram account..?
I stupidly lost the login password. I would love any tricks you can give me!
@Lane Drake instablaster ;)
I am currently working on MPU9250, from scratch, for my rover to track location and orientation underground. This is my first time using such sensor and literally everything about this sensor, and this video is so helpful! I understood everything and made me understand the basics enough for me to make simple algorithms, maybe? I still need a lot of things to learn, but this series is so helpful. THANK YOU SO MUCH BRIAN!
I posted a criticism, but I am really enjoying this content. Looking forward to more
Wow - this is really awesome. Great explanation, superbly prepared, this is one of the best tutorials I saw so far in terms of didactic methods and visualization of a complex topic.
it is the lesson that i need at the moment. i started to learn control to build my own flight controller. going through control theory, sensor fusion, kalman filter etc lessons i believe i will achieve my goal. thank you so much brian.
did you achieved your goal and was it accurate(i mean working well) as you expected, thanks :D
I felt that the lecture contained a massive amount of information and required some good deal of prerequisite knowledge. Does anyone else also feel the same way? If you do can you tell me how you covered that knowledge gap ?
I don't care for the MATLAB language, but they make some damn good video lessons.
Please continue this series......Its very nice and interesting to learn.
When an object rotates in uniform circular motion, the acceleration is not tangent to the circle, but rather towards the center of the circle. The narration, together with the pictures, implied that the acceleration was tangential. That only happens if the object, in addition to traveling in a circle, changes its speed.
You are correct. In my head, I was envisioning the angular rate changing (or it accelerates the speed at which it rotates) then the acceleration would be in the direction I drew. However, my voiceover and the animation didn't match that description and I should have drawn the acceleration vector radially. Thanks for catching this!
This video helps me a lot!! But I was wandering that at 3:07 why could we measure the upward acceleration? Since the phone remained stationary on the table, the total force on it should be balanced and thus be zero. Therefore the phone should not experience any acceleration, right? hope somebody could answer that for me. Thanks!!
I had the same question. I think it has something to do with how accelerometers work. The sensor has a mass suspended with spring(s). The acceleration is calculated based on the compression of the springs. In the case where the phone is stationary, the mass will experience the force of gravity and compress the spring under it which corresponds to an upward acceleration.
Hi Brian, thanks for taking the time to make the videos, they're very helpful. But I was wondering if you could provide me with some references to the subject of system Identification methods (books or videos). Thank you in advance.
how to validate the x, y, z,value if its correct or not
Good lectures briyan!
How do you do the down(gravity) estimation when the imu is moving and not stationary(4:10)? Is it even possible if i dont know the initial orientation of the sensor?
In magnotometer calibration, U said down = -(g) and east = down x mag field. Isn't it should be up instead of down for ENU?
I don't know if I'm following your question exactly but let me answer what I think you're asking and please clarify if I'm wrong. NED and ENU are both coordinate frame conventions that are tied to the same reference (Earth). We could use either frame to describe a rotation but NED is more commonly used in aerospace. In this way, when an accelerometer is sitting on a table, the acceleration it feels is up, or a negative acceleration in the Down axis. And, East would be -accel (which is down) cross mag field. But if we were working in the ENU frame, then the upward acceleration would be positive since it's in the UP direction, and East would mag field cross accel (which is up). Did that make sense and did that answer your question?
Brian, I’m trying this in an airplane,
but in a coordinated turns the sensors would read 0° roll as the gravity vector is pointing down (relative to the aircraft). How is this issue solved? Should I use a different fusion method?
Astonishingly good. Thank you.
with gyro and accelrometer can I measure the orientation
I am getting this error --> Incorrect I2C device connected. Expected I2C addresses: [0x0C]. Detected I2C addresses: [0x68]. how overcome this
Thanks for the nice video. I have a precision to bring about magnetic metals: hard irons keep a residual magnetic field after contact with a magnet (like a steel screw driver), whereas soft irons are attracted by magnets but they don't keep a field, like cast iron and many soft steel plates used in magnetic systems (transformer cores, pots around magnets, etc) Weirdly enough this is a mix of crystallography and quantum effects.
I have a Arduino Nano 33 BLE, and am willing to use it's IMU to make a head tracking device... Any suggestions what to use best?
Thanks...
Expected sensor not detected. Connect the right sensor to the
hardware and try again.
I connected to Mpu9250 and arduino. How can i fix this problem??
Nice video; but I would like to ask a question. Is there some equations/formula for these features how to estimate the position or how far a drone is traveled (would you give more information regarding this too please)? I just want to understand how to apply these on coding section later on, thank you.
The point of this video is to indroduce some of the topics youre asking for equations for.. coz giving eqiations wil just take too long. i think a good start for you would be to research the topics discussed such as quaterions and kalman filters 1st with that youll be able to get the mahoney and magwick filters.
Is there any code implementation for 'Corrupting Linear Accelerations'?
hi, mind if i ask which font were you using in matlab? it looks pretty to my eyes and i haven't been able to find it on the internet.
plz someone tell me what's the font. i still haven't found it... i can't take it anymore
Great Job Brian!!!!
can not we use a multism to implement the circuit the sensor and arduino kit
(0:00 - 2:00) Introduction to the concept of orientation and different ways to represent a rotation such as roll, pitch, yaw, Direction cosine matrix, YZ, and quaternion.
(2:00 - 4:00) Explanation of how to estimate orientation using a magnetometer and an accelerometer. The video explains how to measure the phone's acceleration and the magnetic field to determine the direction of gravity and north.
(4:00 - 6:00) Discussion of the problems with the simple implementation of the orientation estimation, including the effects of linear accelerations and disturbances in the magnetic field.
(6:00 - 8:00) Explanation of how to calibrate the magnetometer to correct for hard and soft iron sources that distort the magnetic field measurements.
(8:00 - 10:00) Discussion of how to deal with corrupting linear accelerations by predicting them and removing them from the measurement, or by ignoring accelerometer readings that are outside of a certain threshold.
(10:00 - 12:00) Introduction of the gyro to measure the angular rate of the system and explanation of how to estimate orientation for a rotating object using just the gyro. This process is called dead reckoning.
(12:00 - 14:00) Discussion of the downsides of dead reckoning, including the need to know the initial orientation and the drift away from the true position due to sensor bias and high-frequency noises.
(14:00 - 16:00) Explanation of how to use sensor fusion to combine the estimates from the accelerometer, magnetometer, and gyro to minimize their weaknesses and maximize their strengths.
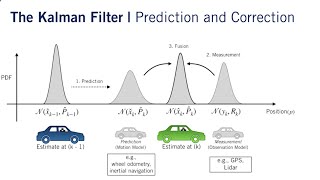
(16:00 - 18:00) High-level explanation of how the blending of the two solutions (accelerometer and magnetometer vs gyro) works in sensor fusion algorithms like the complementary filter or the Kalman filter.
(18:00 - 20:00) Demonstration of how to implement the sensor fusion algorithm in MATLAB using the function ahrsfilter.
(20:00 - 20:32) Conclusion and introduction to the next video, which will add GPS to the IMU and orientation estimate to improve the position obtained from the GPS sensor.
Any thoughts on the 9 DOF chip, LSM9DS1? Wouldn't implementing sensor-fusion be easier if it's all from one chip?
For example, I saw another cool Processing project, but that too doesn't use the ST chip, instead the ADXL345..
"ADXL345 accelerometer breakout board + Arduino and Processing"
how to validate the x, y, z,value if its correct or not
12:06 Can anyone tell me what sample delay is?
Thank you for sharing.
how can we get this code into the microcontroller?
Is it possible to use the same concept but with a camera?
can you please explain how east is cross product of down and magnetic field
If you make the assumption that the magnetic field is pointing in the north direction (and a little down or up) then the down and mag vectors exist within the down/north plane. The cross product of two vectors produces a third vector that is perpendicular to both. So, in this case it would be perpendicular to down/North plane, which is either East or West. Per the right hand cross product rule, down X mag would produce a vector pointing East, and mag X down would produce a vector pointing West. Does that help?
Thanks for this video
I NEED to know what the matlab font is
how am I just finding this channel sigh
this is great!
VERY IMPORTANT! what's the matlab font?
Great content!
i need answer place
if possible to design the circuit using proteus and integrity it with matlab code,show us??????????????????????????????
GREAT, THANKS!
time 6:19 the direction of the acceleration is not correct, at least misleading. Normally when we talk about the acceleration of rotation, it's talking about centrifugal force.
If the bar was rotating at a constant angular velocity then I agree that the accelerometer would report only the centripetal acceleration and it would point toward the center of rotation. But what I was trying to show (poorly) was that when the bar accelerates from stationary to some angular velocity, the majority of the acceleration that the sensor would see could be perpendicular to the bar. Imagine a really long bar with a sensor at the end. If the bar rotated only a fraction of a degree, there wouldn't be much rotation but the end of the bar could have moved up or down quite a long way. This is what the accelerometer is sensing here. But I should have also mentions that rotations also produce a component of acceleration that is along the radius of the rotation. Thanks for the comment!
what is expMFS?
9:00 calibrating
any one can help me i am trying the same code in the vedio but i got an error Incorrect I2C device connected. Expected I2C addresses: [0x0C]. Detected I2C addresses: [0x68].
any one can help me plzz
Great Video. Could you comment on how difficult it would be to do this on a Raspberry Pi?
It depended on youre prior knoledge ofc.
Is a pi powerfull enough to do basic sensor fusion? Yes definatly.
Can you build a basic imu on pi? Yes defo.
But be warned this is a huge topic. E.g. theirs AI aplications for sensor fuaion and navigation that this talk doesnt cover. But i suggest ignor those till after you finished this topic 1st.
Maybe youre wanting to build a simple imu aplication? if so i highly recommend the paul mcwhorter/toptec boy imu series... if you're already familiar with that, then you could add to his coding with a kalman filter, anddead reconing filters perhaos of maybe even make it a 10-12 dof with a gps. If you wanna learn in an introductory series way theirs a 53 part series on kalman filters that is well and truley excellent, sorry i can remember the tubers name but again im sure youll find it within 1 or 2 searches.
I need an urgent answer, please! I used MPU9250 to get the x, y, and z axes' values for the accel, mag, and gyro but I didn't know how to use them to calculate the angle of the sensor from the floor. please help!
PS, very useful explanation in the video.
I want to study about AHRS. can anyone explain to me, what should be learned? and what are the steps to learn it? Thanks
This is how Ingenuity gets around on Mars
thanks a lot ^_^
한국어 자막 너무 감사하다
Did he say "subscribe for future tiktok videos"? LMAO. Great video btw.
Dude how does your brain fit in your skull?!
Bla bla