
- Видео 16
- Просмотров 106 968
Jorgefer88
Добавлен 24 янв 2007
Robotic and electronic designer
Fully 3D printed quadruped robot
In this video I show how my 3D printed quadruped robot can walk and I explain the process.
I am using ROS as a system for the control of all operations and communications.
The Champs controller calculates the inverse kinematics of each leg and then sends it to the robot.
I am using ROS as a system for the control of all operations and communications.
The Champs controller calculates the inverse kinematics of each leg and then sends it to the robot.
Просмотров: 5 988
Видео
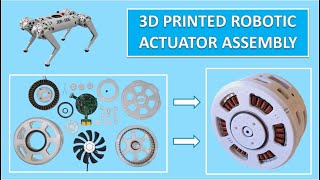

3D Printed Robot Actuator Assembly
Просмотров 34 тыс.Год назад
In this video I show the complete assembly of the robotic actuator designed for my quadruped robot

Quadruped robot 3D printed creation process
Просмотров 28 тыс.Год назад
I want to show you the work in which I have been a little over two years. I have tried to summarize it in the video that you can see. It is a fully 3D printed quadruped robot, including the leg actuators. The electronics of the actuators and the actuators themselves have been designed from scratch, making the total cost of the project much lower. I have run into many problems due to the tempera...

Printer 3D (Blue_Blood) Time Lapse
Просмотров 41411 лет назад
Blue_Blood printing a one "x-end-motor" The print time takes about 2 hours.

Processing Interfaz Robot equilibrista
Просмотров 33211 лет назад
Interfaz que se esta usando para la el testeo de todos los parametros del robot.

Arduino Robot equilibrista V2.0 (Péndulo invertido) - Bluetooth Mando PS3
Просмотров 2 тыс.11 лет назад
Comunicación Bluetooth entre Arduino y mando PS3

Arduino Robot equilibrista V2.0 (Péndulo invertido) - Primeras pruebas
Просмотров 4,8 тыс.11 лет назад
Primeras pruebas ajustando el PID

Arduino - Robot equilibrista (Segway)
Просмотров 4,2 тыс.12 лет назад
El robot se autoequilibra usando solamente un eje del acelerometro. El control del motor se realiza variando la velocidad con el L293B en función del angulo obtenido por el acelerometro. Debido al uso de un solo motor y del peso total, no se recupera de inclinaciones fuertes. Mas adelante lo iré mejorando incorporando un segundo motor, el giroscopio, Kalman y un control mucho mejor de la veloci...

Control de Motor DC con Arduino usando PWM
Просмотров 12 тыс.12 лет назад
Control de Motor DC con Arduino usando PWM
I love this design. it would be great if you could share 3d files and software for us. I plan to build a similar robot myself and it would make my work incredibly easier if I had a pattern, a base for building my own
will you help me in my project.please.😊
great work👍
fantastic
Is this open source, and is it scalable,?
that's great i can print it but where to buy other components like magnets, circuit etc? and can you also give me the stl file for this project. by the way it is good if you share your github.
Hello. Where can I download or buy a design for printing a similar product?
what torque and RPM do the motors have?
Stunning work!. Build quadruped robot from wining coil? I never imagined building the robot from that stage. I think you can reduce the backlash If you change some core mechanical part(especially reducer's gears) to aluminum by using CNC, I think you already know tho!
Absolutely fascinating. I love to take a look into the GitHub repository, you have for sure created for this project. Containing everything regarding your project, like documentation, software and CAD Files, concentrated at a single point. There have to be allready some more versions by now, from which your design will improve and get even better by the time. Just one single year should be enough, to replicate the project and start participating and contributing in the development process. I really think that your open source approach is the way to go for complex private projects that will only benefit from every single new contribution that is made by a worldwide community. You have my upmost respect as a software engineer from germany, for the project you have created and realized here. Even if most essential components like ROS and the Cheeta motor driver/design were alteady existing and freely available for some time now, it's amazing to see someone designing all the parts in CAD from scratch, build complete Motor assemblies and finally create a completely 3D printed prototype . That's an insane accomplishnent and i can not say anything other than offer you my respect for what you have created. Additionally you created and published this and some more videos about this project to let everyone see the result. I really ❤ that !
Any links to the 3d files so we can buy them?
Good
Ok thak you
How I get drawings for this
Sorry, I haven't posted the source files
You're amazing.
Wonderful! How much does each actuator cost to make?
Nice.
can I ask for the program ?
Thanks for the comment! My GUI interface is made with rQT and implemented to communicate with the ROS layer
can i get the code ?@@Jorgefer88
at minute 1:36, can you share the code?@@Jorgefer88
at minute 1:36, can you share the code?@@Jorgefer88
Hola, me encuentro haciendo un proyecto de robotica, y necesito un controlador para mi actuador, tengo pensado usar motores brushless de Hoverboard pero los controladores que he visto Odrive son demasiado caros, queria saber cuanto costaria el controlador FOC que usas y de que manera se puede obtener
Odrive son muy buenos controladores, pero es cierto que son un poco caros. Yo estoy usando un controlador echo por mi basado en el proyecto de código abierto SimpleFOC y el precio de cada placa estaría en torno a los 45€, pero no vendo PCBs. SimpleFOC funciona con mucho hardware compatible y puede llegar a ser muy asequible en precio, te recomiendo que le eches un vistazo ;-)
@@Jorgefer88 conocí ese proyecto hace poco, pero no encuentro como comprar sus tarjetas por aliexpress u otro mercado donde las pueda obtener y que realmente cuesten esos 45 euros
@user-vc5ny6rn7g Los controladores que yo uso están fabricados y soldados por mi, no los vas a poder encontrar en ningún sitio. En aliexpress por ejemplo hay algunas PCBs que son compatibles con SimpleFOC. Te aconsejo que investigues por su página para ver cuáles modelos podrías usar. Otra opción (que es la que yo hice), fue fabricar PCBs desde cero y hacerlas funcionar con ese Firmware.
Este trabajo es exellente!
Muchas gracias 😄
If the motors get hot it means they need less current density and larger diameters to produce the same torque
Or you keep everything the same but you increase the gear ratio and the speed of the motor
@@ap2372 Thanks for the comment! Yes, increasing the stator diameter to 10010 would get much more torque, but winding all the actuators again would be very tedious. I'm currently working on making a new all-metal actuator with a small homemade CNC and I'm going to increase the ratio from 4:1 to 6:1 I will have less speed, but from my tests I think it is still enough.
@@Jorgefer88 I am building a motor (with little knowledge) how to calculate windings, gauge and voltage for 500RPM (and max torque)
Amigo no haz publicado los archivos de impresion 3D
Awesome robot! How did you determine the number of turns that you needed and what size gauge copper to use and get the desired torque? Would appreciate any kind of resources!
Thank you so much! I am limited to a maximum of 5A in the driver. That's why I chose the AWG of the cable so that it could handle those amps without getting overheated. From there, try to introduce the greatest number of turns to achieve the greatest possible torque.
@@Jorgefer88 I see! That's a great idea
Good
Currently, I have connected an unitree 4-leg robot for remote control. I hope to connect your robot.
Great job. As a professional mechanical engineer in robotics, you're off to a great start. Keep learning and pushing yourself!
Thank you so much! I'll keep working!
I did not think PLA would work for a mini-cheetah actuator. For my quadruped design, I rulled it out and went with a 9:1 belt drive reduction. You proved it can be done with a very clean and elegant design. I have 100 questions, here are a few of them 1. How did you build the stator. I understand how to wind the wire, but how to make the metal frame 2. I do not understand the magnetic design of the rotor, or the purpose of the small magnets? Are the large magnet all facing the same way? 3 commutation is "FOC" or 6-step. 4. is the heat just "i squared r"? If so, then would using much higher voltage result in less heat. 5. can you give rough performance specs, torge and power used. You might consider open source, then people would see exactly what you did. Unless you are worried people will copy these and try to sell them. License can prevent that. Do NOT wait until it is finished, place work in progress in GitHub the you update as you mak changes. If you are lucky, the project is popular, and then people send you pull requests to address problems and add features. Looks like I will need to learn to make a rotor and stator
First of all, thank you very much! Are you making a quadruped robot? What electronics/motors do you use? Making this actuator with 3D printing (PLA) has taken me many iterations to get it to work more or less reliably. To this day I still have problems with it, due to the heat and the efforts it has to endure, but it half works :-D I answer your questions: 1. The only piece that I have not built is the stator, it was purchased on Aliexpress. It could be made DIY with cut steel sheets, but I think it would not compensate for the work it takes to do it unless you want something very specific. 2. Small magnets create a "continuous" magnetic flow. This is called the "Halbach Array". Because I don't have a steel external yoke (it's PLA plastic), a lot of magnetic flux escapes outside. In this way it is concentrated inside, towards the stator, causing the torque to increase. Using Halbach Array or external yoke is similar, you can see the detailed explanation here: things-in-motion.blogspot.com/2018/12/the-advantages-and-disadvantages-of.html 3. Switching in FOC is done through 6 steps, yes. You can see the details of how the library I am using works: docs.simplefoc.com/foc_theory 4. Indeed, using more voltage could make it run cooler. It's something I was testing, but starting at 30V I burned a couple of PCB boards, I didn't take that into account when I designed them. That's why I'm currently limited by electronics to 24V. 5. The continuous torque that I can handle is around 2.5N·m, the maximum at 8N·m. I have not calculated the performance and the nominal power will be around 50W. I have considered on several occasions making it open source, but I am a little wary of what you say, that someone will commercialize it. I know that there are different licenses and I'm sure that some may suit me, but for now, it is still in continuous development. Currently I have bought a small CNC to be able to make the actuators completely out of metal, because I have reached a point with plastic and 3D printing, where I cannot make them 100% reliable and durable.
And of course he doesn't provide a link to the STLs... What's the point?
Bro obviously it's his hard work and he can't just publish it for free .... And even if you would ask him respectfully then maybe he would think of sharing his hardwork with you ..... But for that attitude..... No...
Bro obviously it's his hard work and he can't just publish it for free .... And even if you would ask him respectfully then maybe he would think of sharing his hardwork with you ..... But for that attitude..... No...
@@pukhrajdhiman8041 lol dumb take. You should feel bad.
@@pukhrajdhiman8041 The open source community is full of hard working people who freely contribute to society.
Look at a channel called aaed musa, they did an internal cycloidal robotic actuator similar to this but open source
A bit off topic but can I know the name of the song?
Would help if you could explain how you made the stator though. Looking forward to it in an upcoming video😃
Thanks!! The stator is the only commercial part, purchased on Aliexpress
@@Jorgefer88 I see...are the STLs open-source by any chance? I'm also curious to know about the total price for all the parts used in the design.
Excelente trabajo de esfuerzo y paciencia, pero en mi opinion es mejor comprar los actuadores y centrarse en el comportamiento del robot, te puedes tomar toda una vida
Muchas gracias! Si, es una de las cosas que haría si empezara desde cero, porque me ha llevado (y me sigue llevando) mucho más tiempo del imaginado. Ahora estoy diseñado y fabricando unos nuevos actuadores de aluminio fresados con una pequeña CNC 😄
No has pensado en montar una empresa o solo es hobby ?@@Jorgefer88
Un gran trabajo Jorge. Esas placas de control ¿Las has diseñado tú?
Muchas gracias! Si, están diseñadas y soldadas por mi para este proyecto concreto.
Super super amazing work I've ever seen for the robotics!!!
Thanks!
nice
Wow, you hand-wound all those bldcs, and created a custom motor controller, and printed and assembled the pcbs, all solo?
Yes, it's a long job to do all that by myself. But I've learned a lot along the way :-D Now I'm trying to make the actuators out of metal to make it more reliable in the long term.
If you could sell this actuator moto am moe confidence you will have more , buyers and you can change its material that is made from to use aluminum or any metal of your choice that you see it fit to stand for both temperature and strength, the world revolve because people like you inspirer more people on it with this video thank and hope you are hear to stay so that some of us can learn from you
Thank you very much for your words! My idea is to learn everything I can from it. I'm working on making it in metal, but it's pretty slow work. In the future you will see the results!
GND 🎉
Awesome work
so cool! could you bring us the link of this cnc ?
It is model 3020 from the Vevor brand
thank's !@@Jorgefer88
please learn us how to do it it is insane
amazing
Those actuators are extremely awesome! What is roughly the theoretical maximum torque? (if you'd assume you used a metal planetary gearbox, just an intuitive estimate)
The maximum torque I can currently generate is 8N.m at 24V I have tested the actuators with 32V and they generate 12N.m, but with that voltage my PCBs are not reliable and I have broken them.
@@Jorgefer88 Oh nice thank you!
Super interesting! Just wondering, but is it possible to pass the wires through the motor shaft to reduce the amount of wires on the outside? Personally when I made the robot jump the first thing that broke down always was the wiring.
Thank you so much! At first I tried to do what you mentioned, but in my case I can't. I have the magnet for the encoder and the fan on the shaft, so it is impossible for me. If you do not use a fan and use an off-axis encoder it can be done without problems.
Awesome..!
Good Project. Love it. Already Subscribed your Channel. Keep Up !
How can we make a robot dog like in the video by ourselves
It is quite a time job. The important thing is to be able to make a robotic actuator that works correctly.
Hey, this is the best I've seen so far, extremely good job!
Thanks so much!
Very well done. How did you attach the magnets to the housing? Did you glue them to the plastic?
Thank you so much! Yes, I glue the magnets directly to the plastic with cyanoacrylate
Nice. What gap do you have with motors and coil stator? Do you know roughly kv it has and max voltage and current?
And what dimensions is the rotor core?
Wait what is the control interface youre using for pid and control tuning?
The graphical interface is specifically designed by me too. This is made with QT