Second Order Systems in Process Control

HTML-код
- Опубликовано: 18 окт 2015
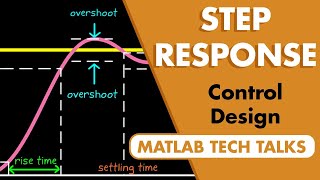
- Second order systems may be underdamped (oscillate with a step input), critically damped, or overdamped. This lecture reviews theory and application of second order systems for process control. Second order systems are particularly useful to describe the closed loop response or underdamped mechanical systems.
 Наука
Наука








Thank you very much for this sir. Very helpful.
Thanks a million
Hi! Can I know what book you're using? thanks in advance
is there a way to approximate zeta from the graph without doing any calculations? I ask this having attended a lecture in which the professor did just that, but I didn't get a chance to ask how they did it.
Yes, here is one method for obtaining the parameters (3) for a second order underdamped (oscillatory) step response: apmonitor.com/pdc/index.php/Main/SecondOrderGraphical
thanks
Hi there, quick question, what text book do you use? Thanks
I formerly used a combination of Practical Process Control (Doug Cooper) and Process Dynamics and Control (Seborg, Edgar, Mellichamp, Doyle). Now I use my online course notes: apmonitor.com/do
Thanks APMonitor, appreciate the reply. Really enjoy your channel here on RUclips, look forward to each video. 👍
Hi. Gret Video series.
I have seen people representing second order system with an equation having two time constant terms (t1 and t2). What are they exactly?
Those are time constants for two first order systems in series: apmonitor.com/pdc/index.php/Main/SecondOrderSystems
@@apm is that applicable only for overdamped systems?
@@HarshitSharma-gc5jb yes, the two first-order form is only for overdamped systems.
Hi thank you very much for the video. How would I proceed with critically damped systems?
Here is more information on underdamped, critically damped, and overdamped second order systems: apmonitor.com/pdc/index.php/Main/SecondOrderSystems
Hello I had an exam question on the same topic where G(s) = K * (s^2 +121)/(s^3+121s+4) , but the poles are on RHS ( very close to Zero) and I was asked to trace the root locus and find values of K to make system stable and comment on the stabilty , over damped , under damped critcaly damped ,oscillation.
Can someone help me please .
Here is help on second order systems: apmonitor.com/pdc/index.php/Main/SecondOrderSystems and stability analysis to generate the root locus plot: apmonitor.com/pdc/index.php/Main/StabilityAnalysis
hello brother is this method(i.e at 21.15) know as damoing method?
I don't see results for that method on Google
Hi , do you know the name of the method use to find the transfer function of the graph?
I just call it a graphical method.
@@apm Thanks
good
Sir, i wonder why u did not time the percent overshoot with 100??
+Munirah Noordin, could you let me know what time in the video you are referencing? If you put in something like 5:00 then it makes a link that brings you to that point.
Please can you make video on 2nd order System poles plots on pz-plane
And how to determine damping ratio and undamped natural from pz-plane ...
Sorry, I don't have much content on frequency response. Here are alternative approaches for tuning apmonitor.com/pdc
@@apm no problem and thanks for the material 👍
This is good but in reality it is hard to measure the peak or times accurately by just looking at a few points. This is OK if only rough estimates are required.
Edit, I just saw yet another video just like this one made at about the same time. The formulas looked the same and used the same variables. It was like both videos were copied out of the same book.
I agree that a few points can be difficult to fit a 2nd order system. Here are the correlations that I typically use for underdamped systems: apmonitor.com/pdc/index.php/Main/SecondOrderGraphical I also like to use optimization methods to fit higher order systems (of arbitrary higher order, followed by model reduction). Here is a 2nd order Python code for fitting 2nd order systems: apmonitor.com/pdc/index.php/Main/SecondOrderOptimization or code for fitting MIMO higher order systems: apmonitor.com/do/index.php/Main/ModelIdentification
Most of the process control education for chemical engineering is from the same book: Seborg, Edgar, Mellichamp, and Doyle. I worked with Tom Edgar at UT Austin for grad studies. Some of the lecture content is from that book so that may be why you are seeing it in multiple places.
Why do some applications use omega and zeta instead of tau zeta?
The two are equivalent. One is a time constant form and the other is a frequency form such as the one used here: pidtuner.com
@@apm ok that makes sense! Thanks! Do you have any content on SRS analysis? Do you know of any free SRS tools?
hi thank you sir for your video
please i have this equation
2*cos(x) - beta*sin(x) + beta*sin(alpha*x) = 0 with alpha and beta two parameters and i need to found x
what can i use for solving this equation
i first use Matlab with function solve but some one tell me to use inverse Lagrange theorem its look complicate for me ...
there is another alternative or something with Matlab to solve my equation?
Try using fsolve to find a solution. Here is a tutorial: apmonitor.com/che263/index.php/Main/MatlabSolveEquations
There is also an fsolve function in Python. You could also try a symbolic solution with SymPy: apmonitor.com/pds/notebooks/10_solve_equations.html