Great video and so much energetic presentation. I was learning reinforcement learning this week. And this is the only material that doesn't only talk about vague and abstract concepts. So much concrete and deliberated contents!
i watched this months ago didnt understand a thing now after watching david silver's course i finally can understand what he's talking about , if you are like me dont get frustrated just read more on the subject
There is an acute lack of good reinforcement learning study materials on the net (especially videos). I literally jumped from my seat. I want to binge watch this series.
People clicking on the "skip ad" button: these people make money out of those ads also, avoiding this is like saying: "Thank you for taking your time to teach people like me, who otherwise would have to pay for this".
The wait is over....the only reason I came into this AI field from electrical engineering is just by watching your videos instead of taking some random courses. ...keep going....Thanks a lot sentdex.
If someone is following this tutorial with the new gymnasium update you need to add new_state, reward, term, trun, _ = env.step(action), instead of new_state, reward, done, _. This should be followed by a if term or trun: done = True this will ensure that the env runs fine
I have completed several Machine & deep learning courses though these months (from Udemy, RUclips, coursera etc), and I even read some famous books about this field. I think your courses are in the top 3 easily, because they are a perfect combination between a well-conducted intuition approach and a fundamental programming part, even better executed. Congratulations for these amazing videos, you deserve our gratitude. I really hope you can get more subscribers during the following years, your content is still underrated. Regards from Spain.
I can't thank you enough for these awesome tutorials you give us . It is the most practical reinforcement learning guide I have ever seen. Please keep up with this AWESOME work .
as pe November 2022, the env.step() is also producing more variables, so have to replace 10 line with new_state, reward, done, truncated,info = env.step(action)
The code working for me was (also required $ pip install pygame) import gym # OpenAI gym env = gym.make("MountainCar-v0", render_mode='human') env.reset() done = False while not done: action = 2 # go right new_state, reward, done, truncated, info = env.step(action) env.render() env.close()
I just got started with reinforcement learning and your tutorial is really helpful. On a side note, I also love the way you laugh (that deep inhale gets me every time).
Hi, first the switch from javascript to python and then give a topic about reinforcement. That is amazing.... The learning curve that you explain make the live from a developer so easy and simple. Thank you. mr.Sentdex
I LOVE THIS! I have been wanting to learn Reinforcement Learning and this is the start. Your videos are NEVER bad. You are teaching this 9 year old(me) with your website and youtube channel. I now know all python basics, AI, robotics, almost all because of YOU!
Man you make learning so easy, i think you have no idea how much you are changing this world for good! So much tutorials out there are linked to you and so much ppl becoming able to reach their dreams because of you. Respect!! Keep up the amazing job
Incredible work, the best explanation i have found. It makes this concepts so easy to understand compared to many books on this topic that i have been studying. Thanks for you awsome work!!!
for others coming here in late 2022 struggling with the rendering due to module updates. import gym env = gym.make("MountainCar-v0", render_mode="human") observation, info = env.reset() done = False while not done: action = 2 observation, reward, done, truncated, info = env.step(action) if done or truncated: observation, info = env.reset() env.close()
you RL videos helped me a lot in my research work. Thank you. Make some videos on Unity Machine Learning agent, hope the audience will be benefited from these videos
As of December 2023 (Python 3.12) import gym env = gym.make("MountainCar-v0", render_mode='human') new_state, info = env.reset() #print(env.observation_space.high) #print(env.observation_space.low) #print(env.action_space.n) done = False while not done: action = 2 new_state, reward, done, truncated, info = env.step(action) print(new_state) if done or truncated: new_state, info = env.reset()
I've been waiting for this for quite some time as I found trying to get into qlearning from purely reading documentation to be a complete mess. Also on a different note I can't be the only one who listens to the tutorials while driving just because it's almost relaxing.
Oh, this is funny! I am currently going through your python-sc2 tutorial and might be attempting to include Q-Learning once I learn about it (I know what you said about it in the video about why you didn't use it) Looking forward to this tutorial! Thank you for the content!
Great video! I have one suggestion though - consider mentioning that gym uses numpy arrays and not basic python lists. It might be confusing for someone that you basically divide a list by list and get another list - its a specific implementation of numpy.array that gives you that high-level convenience. I just stumbled on your video, so maybe you pointed that out in some other videos, but hey, for a newcomer it can be mind-bending after getting some weird bug after some time.
Thank you for the useful lessons, sentdex. It is very interesting to understand the problem of learning based on time series. This is when there is some record of the battle, and you need to train the algorithm on it to choose the best action. I would also want to understand how to prepare such time series for transmission to the algorithm. Something like that. Have a good day!
Thank you for this tutorial. I knew the theory but your tutorial helped me put it to practice. Also for anyone looking for theoretical background into RL, check out David Silver's 10 lecture series on Reinforcement Learning.
Use this if u r facing trouble import gym env = gym.make("MountainCar-v0", render_mode="human") observation, info = env.reset() done = False while not done: action = 2 observation, reward, done, truncated, info = env.step(action) if done or truncated: observation, info = env.reset() env.close()
If you are looking for a continuous action space control, then you may also want to look into DDPG. Otherwise Q-learning and variations on the topic may be a good starting point.
Any chance you could do a tutorial on an actor critic or PPO algorithm after the DQN tutorial? ;) Maybe in the long term a tutorial on combining these algorithms with the unity environment.








When i think about a topic, he posts it. Awesome!
Great video and so much energetic presentation. I was learning reinforcement learning this week. And this is the only material that doesn't only talk about vague and abstract concepts. So much concrete and deliberated contents!
i watched this months ago didnt understand a thing now after watching david silver's course i finally can understand what he's talking about , if you are like me dont get frustrated just read more on the subject
Yeah I think this is not really for complete beginners aha
There is an acute lack of good reinforcement learning study materials on the net (especially videos). I literally jumped from my seat.
I want to binge watch this series.
Exactly
I'm more than happy to support this awesome channel! keep up the great work, i love your tutorials :-D
Thank you so much for supporting free education! You are a great man!
People clicking on the "skip ad" button: these people make money out of those ads also, avoiding this is like saying: "Thank you for taking your time to teach people like me, who otherwise would have to pay for this".
The wait is over....the only reason I came into this AI field from electrical engineering is just by watching your videos instead of taking some random courses. ...keep going....Thanks a lot sentdex.
Hey dude, it’s been 5 years now and a lot has changed, are you still doing AI?
If someone is following this tutorial with the new gymnasium update you need to add new_state, reward, term, trun, _ = env.step(action), instead of new_state, reward, done, _. This should be followed by a
if term or trun:
done = True
this will ensure that the env runs fine
One of the most interesting topics for me. Please, continue! It would be very interesting to see self-driving car with Q-Learning (table / deep)
carla
Running out of memory ;)
I have completed several Machine & deep learning courses though these months (from Udemy, RUclips, coursera etc), and I even read some famous books about this field. I think your courses are in the top 3 easily, because they are a perfect combination between a well-conducted intuition approach and a fundamental programming part, even better executed.
Congratulations for these amazing videos, you deserve our gratitude. I really hope you can get more subscribers during the following years, your content is still underrated.
Regards from Spain.
That's really awesome to hear!
Just what I needed for my master thesis.
I can't thank you enough for these awesome tutorials you give us . It is the most practical reinforcement learning guide I have ever seen. Please keep up with this AWESOME work .
Happy to do it!
For the latest gym package, to avoid backward compatibility warnings
1) define env = gym.make("MountainCar-v0", new_step_api=True, render_mode='human')
2) remove env.render()
bro you literally saved my life thanks a lot
as pe November 2022, the env.step() is also producing more variables, so have to replace 10 line with
new_state, reward, done, truncated,info = env.step(action)
does any one of you have encounter a problem cuz when i write his project , it does run but nothing is shown , i am using python version 3.10 ?
you need to import pygame@@onlyshorts6837
The code working for me was (also required $ pip install pygame)
import gym # OpenAI gym
env = gym.make("MountainCar-v0", render_mode='human')
env.reset()
done = False
while not done:
action = 2 # go right
new_state, reward, done, truncated, info = env.step(action)
env.render()
env.close()
I just got started with reinforcement learning and your tutorial is really helpful. On a side note, I also love the way you laugh (that deep inhale gets me every time).
Hi, first the switch from javascript to python and then give a topic about reinforcement. That is amazing....
The learning curve that you explain make the live from a developer so easy and simple. Thank you. mr.Sentdex
I LOVE THIS! I have been wanting to learn Reinforcement Learning and this is the start. Your videos are NEVER bad. You are teaching this 9 year old(me) with your website and youtube channel. I now know all python basics, AI, robotics, almost all because of YOU!
Man you make learning so easy, i think you have no idea how much you are changing this world for good! So much tutorials out there are linked to you and so much ppl becoming able to reach their dreams because of you. Respect!! Keep up the amazing job
Most awaited topic. And it comes from the one and only Sentdex!! Thanks a lot. Please make as many tutorials as possible.
I feel like this guy knows everything. Whatever I google, he has a tutorial on that.
Incredible work, the best explanation i have found. It makes this concepts so easy to understand compared to many books on this topic that i have been studying. Thanks for you awsome work!!!
You're the best. My simple networks are just not doing the job well enough. Perhaps this series will be what's needed.
Learned a lot from you.... Started machine learning from your channel only...
Q learning is difficult to understand .. I read so many blogs before coming to your channel. You made it easy.
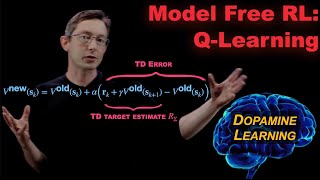
“We just do this! *shows big complicated equation* duh!”
Earned a subscriber lol
Dude how do you alway know what kinds of videos I need?! This is perfect!
He's made a secretive and expansive AI that monitors every single viewer
for others coming here in late 2022 struggling with the rendering due to module updates.
import gym
env = gym.make("MountainCar-v0", render_mode="human")
observation, info = env.reset()
done = False
while not done:
action = 2
observation, reward, done, truncated, info = env.step(action)
if done or truncated:
observation, info = env.reset()
env.close()
thank you
Hi could you point to resource where i could find an updated version of this
how on god green earth found the answer ?
please
Thank you so much.
you are great man actually ,you are my mentor now
Uhh, just sitting on the toilet and the notification comes in. Some nice ML quality content from my favorite python buddy
"How do we do that? , We just do this *Shows the Q Function* , DUH!"
That cracked me up xD
Nice topic! Hope it will have at least 100 series. Thank you!
Yay! Thank you Sentdex for these brilliant tutorials.
Hey I know you twitter guy
Number one AI channel on yt by far
I try to use DQN to plan an agent’s route in a dense moving crowd. My tools are UE4 and TF + Cuda. Can’t wait for the deep Q-learning video.
Wow.....This is Video I Was Waiting For.....Thanks, Harrison.
you RL videos helped me a lot in my research work. Thank you. Make some videos on Unity Machine Learning agent, hope the audience will be benefited from these videos
im so excited about this new series! good luck, will be looking for next episodes :D
The thing I've been waiting for, you're awesome!
Finally, I have been waiting for this. Please do a long series! Thank you
It will be JUST the right length :D
Please be quick with the next videos, I am working on a project and I am gonna need your help,
Keep up the good work
Thank you for nice deep"Q"Learning video
Yes! I have the hard copy of sutton barto. Now is the time to open it :)
You are an absolute boss. Thank you for the quality content!
Just love your videos and explanations. I was just waiting for the Q-Learning Tutorial Series.
15:34
_"That's gotta be the best table I've ever seen"_
_"So it would seem..."_
"paint is love, paint is life" -sentdex 2019
Thank you very much for this. It would be cool to see qlearning applied to some little game like connect 4. Keep up the good work!
Was waiting for this!
This is really a great explanation. I love this
it is so helpful my thesis, thanks a lot
As of December 2023 (Python 3.12)
import gym
env = gym.make("MountainCar-v0", render_mode='human')
new_state, info = env.reset()
#print(env.observation_space.high)
#print(env.observation_space.low)
#print(env.action_space.n)
done = False
while not done:
action = 2
new_state, reward, done, truncated, info = env.step(action)
print(new_state)
if done or truncated:
new_state, info = env.reset()
env.close()
Can't wait for the next episode! Great work, and ofc thank you.
Next one is out :D
@@sentdex watched!!! and love you as yesterday!!!!!!!
I've been waiting for this for quite some time as I found trying to get into qlearning from purely reading documentation to be a complete mess.
Also on a different note I can't be the only one who listens to the tutorials while driving just because it's almost relaxing.
I've heard from quite a few ppl that they just listen to listen lol.
Oh, this is funny! I am currently going through your python-sc2 tutorial and might be attempting to include Q-Learning once I learn about it (I know what you said about it in the video about why you didn't use it)
Looking forward to this tutorial! Thank you for the content!
Thank you very much, amazing work
Excited for this tutorial series :D
Same!
Omg! RL I'm so excite!
Thank u for this awesome video and series
You are a legend man! Thank you
Amazing channel man, keep doing this!!!
I guess you will be showing us many of the real-time examples which have a broad scope. Thank you..! :)
Was really looking forward to you doing more RL stuff :)
Great video! I have one suggestion though - consider mentioning that gym uses numpy arrays and not basic python lists. It might be confusing for someone that you basically divide a list by list and get another list - its a specific implementation of numpy.array that gives you that high-level convenience. I just stumbled on your video, so maybe you pointed that out in some other videos, but hey, for a newcomer it can be mind-bending after getting some weird bug after some time.
That was exactly one of my problems!
thanks a lot
Thanks for the tutorials.!(eagerly waiting for DQN cuz i am kinda stuck there.!)
.
loved your thinking about the education system.!
Thanks for the great tutorial ! Can't wait for the next video !!!!!!!
Can you upload a series on GAN. Really need to know the intuition behind it
yesssss
I really enjoy your lessons. Thank you very very much.
is there any good video that doesn't use gym ? searching around leads to gym only.
Thank you for the useful lessons, sentdex.
It is very interesting to understand the problem of learning based on time series. This is when there is some record of the battle, and you need to train the algorithm on it to choose the best action. I would also want to understand how to prepare such time series for transmission to the algorithm. Something like that. Have a good day!
Great, well explained intro. Thanks!
Awesome content that is always new to me. Thanks!
Sentdex you're the best!
Love your mug
Great video! Thank u so much!
Thanks a lot 😊 , very helpful
That's what I was waiting for
"Paint is love, Paint is life"
Love this channel.
Thank you for this tutorial. I knew the theory but your tutorial helped me put it to practice. Also for anyone looking for theoretical background into RL, check out David Silver's 10 lecture series on Reinforcement Learning.
hello, at 4:50 , isnt position and velocity vector values? Therefore shouldn't the state be 2 tuples , 4 values instead of two ints?
Use this if u r facing trouble
import gym
env = gym.make("MountainCar-v0", render_mode="human")
observation, info = env.reset()
done = False
while not done:
action = 2
observation, reward, done, truncated, info = env.step(action)
if done or truncated:
observation, info = env.reset()
env.close()
Finally!! You are the best
This is very clear. Thank you.
Great video, as always.
amazing how you know so many things!
Love the videos and a series, thanks for putting these out
I was waiting for this... RL teached by you !! and I have commented even before seeing the video
finally RL is here. I've been stuck with A3C recently. Hope one day you will cover it
If you are looking for a continuous action space control, then you may also want to look into DDPG. Otherwise Q-learning and variations on the topic may be a good starting point.
I think you might confuse the discount factor with the learning rate. The discount factor can be based on how the reward is distributed across time.
This is gold
you are awesome man. I love tour channel
wwwwwwwhat is goin on everybody!!
love it!
this is super cool
can u suggest me some other videos/chanels also sharing about RL like this. This is the most funny and easy to understand video i have ever watched
YEEESSSS!!!!
Man, Thank you so much. I love you for this.
Any chance you could do a tutorial on an actor critic or PPO algorithm after the DQN tutorial? ;) Maybe in the long term a tutorial on combining these algorithms with the unity environment.
man i haven't seen Q learning videos at all before this
Great job!
also we need pygame installed too for the gym to show us the actual environment
Excellent!