Soft Grippers Featuring Pneumatic Fingers with Local Bending Joints - IEEE/ASME 2024 AIM Conference

HTML-код
- Опубликовано: 11 сен 2024
- School of Engineering, Department of Industrial and Mechanical Engineering
Lebanese American University
Full Manuscript | IEEEXplore | 2024 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM).
ieeexplore.iee...
This study was supported by the Lebanese American University.
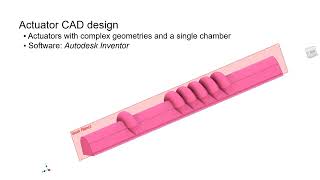
"Soft robots are becoming increasingly popular and are being used in different industries, such as retail, healthcare, food and beverages, and logistics. They are widely employed nowadays to manufacture innovative products. This area of robotics focuses on flexible and stretchable materials, such as silicone and other engineered soft materials, with mechanical properties close to those of living tissues. One active area of soft robotics is soft grippers that can grasp, move, and handle a wide variety of objects, even very delicate ones, without damaging them. The advantage of such grippers is that they can be safely operated near humans. This work reports on a soft gripper that is designed and developed based on 3D printed soft pneumatic fingers with localized bending joints. The introduction of localized bending joints enhances the deformation behavior at lower actuation pressures and provides a linear relationship between the input pressure and both the output deformation and tip force. This linearity is crucial for directly controlling the actuators using simple controllers. The actuators are manufactured using an open-source 3D printer using a thermoplastic polyurethane (TPU). Finite element modeling (FEM) is used in the design process to optimize and predict the behavior of the soft pneumatic actuators in terms of deformation and force output. The soft pneumatic fingers are demonstrated by showing that a gripper can grasp a wide variety of objects with multiple shapes, weights, textures, and stiffnesses successfully. "