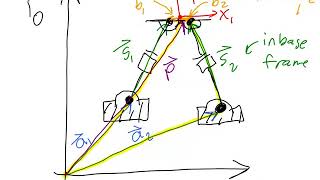
In step 1): when we calculate the coordinates of the platform corners in the platform frame, why do we add the coordinates of the platform (x_c and y_c). I thought the difference between the two coordinate-origins is calculated with the transformation matrix. In this case the coordinates of the platform corners are calculated starting from o_c and the parameters x_c and y_c are not used in step 1. Is there something I'm missing here?
You are correct, the matrix on the right at 8:04 is actually p1 after the transformation and not before. So p_1^0 = that matrix (the answer to the problem) and p_1^c = [-rp*cos(pi/6); -rp*sin(pi/6); 0; 1]; which gets p_1^0 if you multiply it by the transformation matrix T_c^0.
Really wish this was written more like software with meaningful variable names rather then mathematical shorthand since this equation is more likely to be used in software rather then mathematics. It took me forever to wrap my head around PID controllers since everything was always written in mathematical short hand rather then in pseudo code.
You can call the variables whatever you want in software as long as you know what they represent mathematically, but the code must be based on math. Pause the video at 8:54 for a peek at the code.









Good explaining.I hope a tutorial how to get the Jacobin & inverse dynamic by importing as Sims cape by MAT LAB.
In step 1): when we calculate the coordinates of the platform corners in the platform frame, why do we add the coordinates of the platform (x_c and y_c). I thought the difference between the two coordinate-origins is calculated with the transformation matrix. In this case the coordinates of the platform corners are calculated starting from o_c and the parameters x_c and y_c are not used in step 1. Is there something I'm missing here?
You are correct, the matrix on the right at 8:04 is actually p1 after the transformation and not before. So p_1^0 = that matrix (the answer to the problem) and p_1^c = [-rp*cos(pi/6); -rp*sin(pi/6); 0; 1]; which gets p_1^0 if you multiply it by the transformation matrix T_c^0.
Aah, I get it. Thank you for the explanation!
can someone share the stewart platform code with me? Unfortunately, I don't know enough to write this code.
Can you share the matlab code of the inverse kinematics to me to understand this better?
The file is proprietary, but you can pause the video at 8:54 for a peek at the code.
Really wish this was written more like software with meaningful variable names rather then mathematical shorthand since this equation is more likely to be used in software rather then mathematics. It took me forever to wrap my head around PID controllers since everything was always written in mathematical short hand rather then in pseudo code.
You can call the variables whatever you want in software as long as you know what they represent mathematically, but the code must be based on math. Pause the video at 8:54 for a peek at the code.
Code > Math
po2,y is yp + rp*sin(theta_z - pi/6)