Time Response Specifications: Control Systems 2.4

HTML-код
- Опубликовано: 22 май 2024
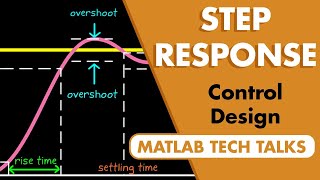
- Time response and their specifications are an important method of quantizing a control system. If we consider higher order systems, they usually have two poles which are underdamped and dominate the other poles. So higher-order systems are generally underdamped in nature. Now, get to learn about time response specifications, considering the following questions: How fast does the system move to follow the input? How much oscillation is in the response of the system? How long does it take to reach the final value? The specifications which answer the above questions are called the time response specifications.
This video tutorial is based on the excellent written tutorial that Kushal created and we highly recommend you go check it out to get to more in-depth information and a more rigorously mathematical approach. His tutorial is found here:
www.circuitbread.com/tutorial...
Table of Contents:
0:00 Introduction
0:36 What are the time response specifications?
3:01 Calculating the time response specifications
6:25 Summary
7:10 Have you seen everything that CircuitBread.com offers?
For electronics tools, tutorials, equations and more check out our site: www.circuitbread.com
And check out our Friends of CircuitBread, who offer special discounts, product samples, resources and more to our users: www.circuitbread.com/friends
CircuitBread is joining the fight to help people more easily learn about and use electronics. With an ever-growing array of equations, tools, and tutorials, we're striving for the best ways to make electronics and electrical engineering topics more accessible to everyone. Come learn electronics with us!
Connect with CircuitBread:
Discord ➤ / discord
Instagram ➤ / circuitbread
Facebook ➤ / circuitbread
Twitter ➤ / circuitbread  Наука
Наука








Hi there! got to say that for an engineering study channel, this one has great production value
I got a couple of questions about the topic:
1. Does t_p > t_r > t_d always hold?
2. Why is it helpful to have delay time and rise to be separate measures? how different can they be?
Thanks! We have a great video team and they do a good job making things look nice.
1) t_p can equal t_r in overdamped systems IF you're considering t_r to go all the way to 100%. However, as far as I'm aware, most people assume that t_r would only go to 90% of the value. So, in most cases, yes, that hierarchy tends to hold unless you're deviating from the "standard" definitions.
2) t_d and t_r can be significantly different! And since the slope is almost never linear, you can't just make an assumption of one off of the other. Unless you're playing it very loose which, hey, I'm not your boss. Do what you want. I think this would come in handy in digital circuits as the transition state is usually somewhere around 50% (that's not actually true but a closer assumption than 100% - and here I am, playing it very loose).
I hope that helps, have a great day!
Lets goooo Control Systemssss!
Why are you getting internal errors on your website? Or is it a problem out here?
The problem seems to be fixed now. Are you still seeing these errors on our site?