Really nice that you start with the most simple examples! For me, starting with them is the right approach, and afterwards one can look at the theory of solutions, more general methods etc.
Inverse kinematics is a way to figure out how to move the different parts of a robot or character to get them to reach a certain point or follow a specific path. It's like solving a puzzle where you have to figure out which pieces to move to get to the right spot!
Omg wait I've been trying to use this formula for a digital robot but its been just basically flailing the arm around, and I've had no idea why. I'm going to go and change this, and check if that fixes things, and I hope to god it does, because I have no other ideas of what could be the problem.
I just simulated the 2-link solution (I put the formulas inside octave and GeoGebra). It completely breaks as soon as you play around with l1,l2,x and y even if there's clearly 2 solutions. Is it possible that there is an error in the formulas?
If you don't care about psi (redundant case), it can be whatever you want. Otherwise it might be fixed depending on what kind of object you want to pick up. The example is theoretical to illustrate the concepts of inverse kinematics.
My main issue also is figuring out the bounds for psi. What values should that be? I think in practice it might be possible to just choose some values and solve via some computational methods, but is there a better analytical solution for choosing this value? In terms of representations, instead of the hard geometry, can you model the problem with transform matrices, so each point is effectively a transform that depends on rotation and the location? You then combine the values and simply take the inverse? Picking psi is still a challenge I suppose. Seems easier that way since can be extended to 3 dimensions easily. I think that's probably a better representation?
The first thought that comes to mind about psi (no idea how it's actually done, this is just an idea), is to assume that the first two sticks are in line with each other (logically, they will be at the upper and lower bound for psi). This means it can be treated as a single stick with a known length (just the sum of the two that make it), and then it's a two-stick problem, which we know how to solve. And that'll get you the bounds :)









Really nice that you start with the most simple examples!
For me, starting with them is the right approach, and afterwards one can look at the theory of solutions, more general methods etc.
Can you explain me what is the purpose of this please ?
Inverse kinematics is a way to figure out how to move the different parts of a robot or character to get them to reach a certain point or follow a specific path. It's like solving a puzzle where you have to figure out which pieces to move to get to the right spot!
Extremely helpful... Please make more videos on robotics and please cover the the dynamics portion and all.
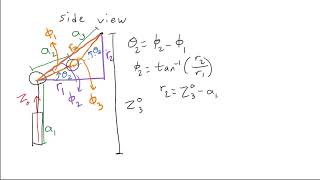
There seems to be a mistake at 4:21.
it says tan^-1(x/y) when I believe it should be tan^-1(y/x).
The previous slide says y/x.
Hello you made a mistake on min 4:22 the formulas should be arctan(y/x) and not arctan(x/y)
Omg wait I've been trying to use this formula for a digital robot but its been just basically flailing the arm around, and I've had no idea why.
I'm going to go and change this, and check if that fixes things, and I hope to god it does, because I have no other ideas of what could be the problem.
6:58 - end
for 2 dof, wont the q1 also change
Very nice video!
crystal clear
Can u please calculate another example? For my University its "to simple" to use one of these
How do we solve for x = 0 (fully horizontal) or y = 0 (fully vertical)?
I just simulated the 2-link solution (I put the formulas inside octave and GeoGebra).
It completely breaks as soon as you play around with l1,l2,x and y even if there's clearly 2 solutions. Is it possible that there is an error in the formulas?
For the three link, how would one determine Ψ if the desired (x,y) endpoint is at or below the origin x axis.
If you don't care about psi (redundant case), it can be whatever you want. Otherwise it might be fixed depending on what kind of object you want to pick up. The example is theoretical to illustrate the concepts of inverse kinematics.
thank for sharing, so useful and easy to understand.
how about 4 links
Mistake at 2:49 should be d^2
agreed
very helpful
what does it mean that -1 next to cos mean?
Are you referring to inverse cos?
yes and I already figure it out
My main issue also is figuring out the bounds for psi. What values should that be? I think in practice it might be possible to just choose some values and solve via some computational methods, but is there a better analytical solution for choosing this value?
In terms of representations, instead of the hard geometry, can you model the problem with transform matrices, so each point is effectively a transform that depends on rotation and the location? You then combine the values and simply take the inverse? Picking psi is still a challenge I suppose. Seems easier that way since can be extended to 3 dimensions easily. I think that's probably a better representation?
The first thought that comes to mind about psi (no idea how it's actually done, this is just an idea), is to assume that the first two sticks are in line with each other (logically, they will be at the upper and lower bound for psi). This means it can be treated as a single stick with a known length (just the sum of the two that make it), and then it's a two-stick problem, which we know how to solve. And that'll get you the bounds :)