
- Видео 23
- Просмотров 41 728
RoboDesign Lab
Добавлен 23 авг 2020
The RoboDesign Lab at the University of Illinois at Urbana-Champaign (UIUC) is directed by Prof. Joao Ramos. Our research group focuses on creating robots that leverage their software and hardware intelligence to perform demanding physical tasks.
Equilibrium Point Estimation and Control of Wheeled Inverted Pendulum
Equilibrium Point Estimation and Control of Wheeled Inverted Pendulum
Просмотров: 169
Видео


Wheeled Humanoid Bilateral Teleoperation with Position-Force Control for Dynamic Loco-Manipulation
Просмотров 62314 дней назад
Paper: arxiv.org/abs/2407.12189 Abstract - Remote-controlled humanoid robots can revolutionize manufacturing, construction, and healthcare industries by performing complex or dangerous manual tasks traditionally done by humans. We refer to these behaviors as Dynamic Loco-Manipulation (DLM). To successfully complete these tasks, humans control the position of their bodies and contact forces at t...
Control- & Task-Aware Optimal Design of Actuation System for Legged Robots
Просмотров 465Год назад
Paper: arxiv.org/abs/2307.11573 Title: Control- & Task-Aware Optimal Design of Actuation System for Legged Robots using Binary Integer Linear Programming Authors: Youngwoo Sim, Guillermo Colin and Joao Ramos Abstract - Athletic robots demand a whole-body actuation system design that utilizes motors up to the boundaries of their performance. However, creating such robots poses challenges of inte...

Whole-Body Dynamic Telelocomotion
Просмотров 1,1 тыс.Год назад
Paper: arxiv.org/abs/2307.10533 Title: Whole-Body Dynamic Telelocomotion: A Step-to-Step Dynamics Approach to Human Walking Reference Generation Authors: Guillermo Colin, Joseph Byrnes, Youngwoo Sim, Patrick Wensing, and Joao Ramos Abstract: Teleoperated humanoid robots hold significant potential as physical avatars for humans in hazardous and inaccessible environments, with the goal of channel...
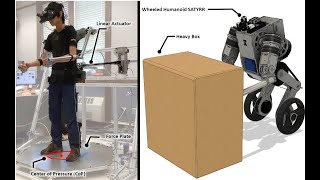
Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Wheeled Humanoid
Просмотров 1,8 тыс.Год назад
Abstract - Humanoid robots have the potential to help human workers by realizing physically demanding manipulation tasks such as moving large boxes within warehouses. We define such tasks as Dynamic Mobile Manipuilation (DMM). This paper presents a framework for DMM via whole-body teleoperation, built upon three key contributions: Firstly, a teleoperation framework employing a Human Machine Int...


Bipedal Robot Walking Control Using Human Whole-Body Dynamic Telelocomotion
Просмотров 1,2 тыс.Год назад
Paper: arxiv.org/pdf/2209.06964.pdf Abstract - For humanoids to be deployed in demanding situations, such as search and rescue, highly intelligent decision making and proficient sensorimotor skill is expected. A promising solution is to leverage human prowess by interconnecting robot and human via teleoperation. Towards creating seamless operation, this paper presents a dynamic telelocomotion f...

Shared-Control with Bilateral Feedback for Obstacle Avoidance Telelocomotion of Wheeled Humanoids
Просмотров 303Год назад
Paper: arxiv.org/pdf/2209.03994.pdf Abstract - Teleoperation has emerged as an alternative solution to fully-autonomous systems for achieving human-level capabilities on humanoids. Specifically, teleoperation with whole-body control is a promising hands-free strategy to command humanoids but demands more physical and mental effort. To mitigate this limitation, researchers have proposed shared-c...

Hybrid LMC: Hybrid Learning and Model-based Control for Wheeled Humanoids via Ensemble Deep RL
Просмотров 259Год назад
Control of wheeled humanoid locomotion is a challenging problem due to the nonlinear dynamics and underactuated characteristics of these robots. Traditionally, feedback controllers have been utilized for stabilization and locomotion. However, these methods are often limited by the fidelity of the underlying model used, choice of controller, and environmental variables considered (surface type, ...
Hands-free telelocomotion of SATYRR
Просмотров 2,2 тыс.2 года назад
Paper: arxiv.org/pdf/2203.03558.pdf Title - Hands-free Telelocomotion of a Wheeled Humanoid toward Dynamic Mobile Manipulation via Teleoperation Abstract - Robotic systems that can dynamically combine manipulation and locomotion could facilitate dangerous or physically demanding labor. For instance, firefighter humanoid robots could leverage their body by leaning against collapsed building rubb...
TELLO leg mechanism test
Просмотров 8 тыс.2 года назад
Manuscript: Y. Sim and J. Ramos, “Tello Leg: The Study of Design Principles and Metrics for Dynamic Humanoid Robots” 2022 Link: arxiv.org/pdf/2203.00644.pdf Abstract: To be useful tools in real scenarios, humanoid robots must realize tasks dynamically. This means that they must be capable of applying substantial forces, rapidly swinging their limbs, and also mitigating impacts that may occur du...
Planar high force haptic device
Просмотров 1,4 тыс.2 года назад
Link to paper: arxiv.org/pdf/2203.03516.pdf Title: A Large Force Haptic Interface with Modular Linear Actuators Abstract - This paper presents a haptic interface with modular linear actuators which can address limitations of conventional devices based on rotatory joints. The proposed haptic interface is composed of parallel linear actuators that provide high backdrivability and small inertia. T...
Hands-free Telelocomotion of the Wheeled Humanoid SATYRR toward Dynamic Mobile Manipulation
Просмотров 9952 года назад
Hands-free Telelocomotion of the Wheeled Humanoid SATYRR toward Dynamic Mobile Manipulation
Dynamic Locomotion Teleoperation of a Wheeled Humanoid Robot
Просмотров 1,4 тыс.2 года назад
Video accompanying the paper: arxiv.org/pdf/2109.03906.pdf Abstract - Bilateral teleoperation provides humanoid robots with human planning intelligence while enabling the human to feel what the robot feels. It has the potential to transform physically capable humanoid robots into dynamically intelligent ones. However, dynamic bilateral locomotion teleoperation remains as a challenge due to the ...
Joint vs Task Space Mappings for Dynamic Teleoperation of a Robotic Arm in Reaction Tests
Просмотров 7473 года назад
Joint vs Task Space Mappings for Dynamic Teleoperation of a Robotic Arm in Reaction Tests
The dynamic effect of mechanical losses of transmissions on the equation of motion of legged robots
Просмотров 1,8 тыс.3 года назад
The dynamic effect of mechanical losses of transmissions on the equation of motion of legged robots
A Comparison Between Joint Space and Task Space Mappings for Dynamic Teleoperation in Reaction Tests
Просмотров 2,2 тыс.3 года назад
A Comparison Between Joint Space and Task Space Mappings for Dynamic Teleoperation in Reaction Tests
HOPPY: Hardware assembly instructions - CORRECTED
Просмотров 6603 года назад
HOPPY: Hardware assembly instructions - CORRECTED
HOPPY: An open-source and low-cost kit for dynamic robotics education
Просмотров 9703 года назад
HOPPY: An open-source and low-cost kit for dynamic robotics education
HEP actuation hopping leg prototype - Mechanism test
Просмотров 5 тыс.3 года назад
HEP actuation hopping leg prototype - Mechanism test
HOPPY: a low cost hopping robot for robotics education
Просмотров 1,4 тыс.3 года назад
HOPPY: a low cost hopping robot for robotics education
Where can I find the paper?
Paper link in the description!
@@robodesignlab5050 Thank you.
HAPPY
How much it costs for this design😲😊
Loving it! Awesome work Joao and team!
Thank you for sharing.
Nice!
I buy that for a dollar !
Awesome!! 🤩
Looking forward to more advancements! Just curious though, why not add two motors to control the ankle? Is the plan to have the actuation of the upper hip compensate for the lack of roll on the foot?
it is already a great deal of work to create a full humanoid, so we pruned things out and focused on the use of parallel actuation.
Are those actuator modules the T-Motor ones? Looks awesome!
Haha no it is from steadywin. The motor is basically a replica of Ben Katz' second iteration of cheetah motors. mechanical build quality is pretty good, had some issues with comms.
very nice work!!!!