
- Видео 9
- Просмотров 7 276
sirius_legged cuhk_robot
Добавлен 12 янв 2023
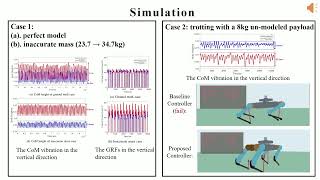
Fast Online Omnidirectional Quadrupedal Jumping Framework Via Virtual-Model Control and Minimum Jerk
Exploring the limits of quadruped robot agility, particularly in the context of rapid and real-time planning and execution of omnidirectional jump trajectories, presents significant challenges due to the complex dynamics involved, especially when considering significant impulse contacts. This paper introduces a new framework to enable fast, omnidirectional jumping capabilities for quadruped robots. Utilizing minimum jerk technology, the proposed framework efficiently generates jump trajectories that exploit its analytical solutions, ensuring numerical stability and dynamic compatibility with minimal computational resources. The virtual model control is employed to formulate a Quadratic Pr...
Просмотров: 309
Видео

Adaptive Model Predictive Control with Data-driven Error Model for Quadrupedal Locomotion
Просмотров 916 месяцев назад
Adaptive Model Predictive Control with Data-driven Error Model for Quadrupedal Locomotion

Old Robot With New Algorithm With 20Kg Payload
Просмотров 65Год назад
Old Robot With New Algorithm With 20Kg Payload

Evolutionary-Based Online Motion Planning Framework for Quadruped Robot Jumping
Просмотров 70Год назад
Offline evolutionary-based methodologies have supplied a successful motion planning framework for the quadrupedal jump. However, the time-consuming computation caused by massive population evolution in offline evolutionary-based jumping framework significantly limits the popularity in the quadrupedal field. This paper presents a time-friendly online motion planning framework based on meta-heuri...


To fall or not to fall, that is the question?
Просмотров 75Год назад
Slippery ground test with Sirius-belt.

An Optimal Motion Planning Framework for Quadruped JumpingIROS 3386
Просмотров 124Год назад
Abstract: This paper presents an optimal motion planning framework to generate versatile energy-optimal quadrupedal jumping motions automatically (e.g., flips, spin). The jumping motions via the centroidal dynamics are formulated as a 12-dimensional black-box optimization problem subject to the robot kino-dynamic constraints. Gradient-based approaches offer great success in addressing trajector...

The evolution of our quadruped robot dogs
Просмотров 3,6 тыс.Год назад
It's hard for us to make all the code and hardware for the bigger dog even though it is based on the Open source Mini cheetah. We redesigned the motor hardware; the motor ( rated torque up to 75Nm), SPI2CAN and the controller. We have already created a new mechanical design. This will be totally different from a cheetah shape-like. It will be released soon.