
- Видео 45
- Просмотров 18 046
Control Seminar
Добавлен 9 сен 2022
Towards safe and resilient autonomy using synergistic control, observation and learning
Dimitra Panagou
Associate Professor
UM Robotics and Aerospace Engineering
Abstract: Enabling autonomy for robotic and cyber-physical systems with provable safety and resilience guarantees has been an ongoing area of research. Despite significant progress over the years, there are still open challenges due to constraints (e.g., safety and time specifications; sensing, computation and communication limitations), and environmental uncertainty. This plenary talk will present some of our recent results and ongoing work on a framework that interconnects control, planning and learning methods towards provably-correct safety-critical systems under constraints and uncertainty.
Bio: Dimitra Panagou rec...
Associate Professor
UM Robotics and Aerospace Engineering
Abstract: Enabling autonomy for robotic and cyber-physical systems with provable safety and resilience guarantees has been an ongoing area of research. Despite significant progress over the years, there are still open challenges due to constraints (e.g., safety and time specifications; sensing, computation and communication limitations), and environmental uncertainty. This plenary talk will present some of our recent results and ongoing work on a framework that interconnects control, planning and learning methods towards provably-correct safety-critical systems under constraints and uncertainty.
Bio: Dimitra Panagou rec...
Просмотров: 74
Видео


Competence-aware Planning and Control
Просмотров 93День назад
Hamidreza Modares Assistant Professor Michigan State University Abstract: Existing motion planning approaches typically separate the high-level planning from the low-level control. That is, the high-level planner does not account for the competence of the low-level controller in following its plans, given uncertainties on the system’s dynamics model and its surrounding environments. Even though...

Enabling automatic building envelope retrofits using controls and machine learning
Просмотров 18114 дней назад
Bryan Maldonado Research Staff Member Oak Ridge National Laboratory’s Buildings and Transportation Science Division Abstract: Buildings contribute to over 35% of the total CO2 emissions in the United States, with 52% of these structures predating the 1980 energy codes. The absence of appropriate thermal insulation in these older structures leads to 20% higher energy use when compared to code-co...
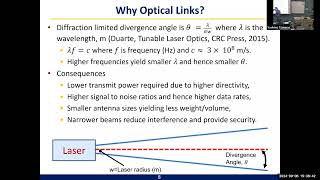
Robust Online Convex Optimization for Disturbance Rejection
Просмотров 16821 день назад
Peter Seiler Associate Professor Electrical Engineering and Computer Science Abstract: This talk will consider robust disturbance rejection in high precision applications. We will start by motivating the work with one relevant problem: the control required for optical communication between satellites. We will then discuss the fundamental performance limits associated with linear time invariant ...

Frontiers of Autonomous Space Systems: Navigating the Future of Exploration and Technology
Просмотров 1585 месяцев назад
Giusy Falcone Assistant Professor, Aerospace Engineering University of Michigan Abstract: In the contemporary era, the zeal for space exploration demands sophisticated autonomous systems for navigating unforeseen challenges. This seminar explores the evolving field of space technology, focusing on drag modulation, autonomous decision-making, and sustainability in shaping future missions. It pos...

Low Gain Feedback for Linear Systems: Input Saturation and Input Delay
Просмотров 1295 месяцев назад
Zongli Lin Professor of Electrical and Computer Engineer University of Virginia Abstract: Low gain feedback refers to a family of stabilizing state feedback gains that are parameterized in a scalar, referred to as the low gain parameter, and go to zero as the low gain parameter decreases to zero. Low gain feedback was initially proposed to achieve semi-global stabilization of linear systems sub...
Leveraging Data and the Koopman Operator to Make Soft Robots More Capable
Просмотров 2756 месяцев назад
Daniel Bruder Assistant Professor, Mechanical Engineering University of Michigan Abstract: Soft robots are able to safely interact with delicate objects, absorb impacts without damage, and adapt to the shape of their environment, making them ideal for applications that require safe robot-human interaction. However, their use in real-world applications has been limited due to the difficulty invo...

Grid Integration of Distributed Energy Resources:Aggregate Flexibility Quantification+Market Partici
Просмотров 1116 месяцев назад
Bai CuiAssistant Professor, Electrical and Computer Engineering Iowa State University Abstract: The electric power system is undergoing a rapid and deep decarbonization with the increasing penetration of renewable energy sources. The heightened penetration level of renewables in the form of distributed energy resources (DERs) underscore their growing significance as providers of grid services. ...

Surprising smoothness in common multi-contact collisions (Intro not recorded)
Просмотров 1566 месяцев назад
Shai Revzen Associate Professor, Electrical Engineering and Computer Science University of Michigan, College of Engineering ABSTRACT: In many practical situations in robotics and biomechanics, objects collide along multiple contact points which form contacts in a state-dependent order. Examples include a human catching a basketball - 10 contacts forming in an unknown order - or a quadrupedal ro...
Advanced, Adaptive and Flexible Algorithms for Decentralized Optimization
Просмотров 2116 месяцев назад
Albert S. Berahas Assistant Professor, Industrial and Operations Engineering University of Michigan, College of Engineering Abstract: The problem of optimizing an objective function by employing a decentralized procedure using multiple agents in a connected network has gained significant attention over the last decades. This is due to the wide applicability of decentralized optimization to many...
Theoretical Foundation of Learning-based Planning for Linear Temporal Logic Objectives
Просмотров 2427 месяцев назад
Yu Wang Assistant Professor, Mechanical & Aerospace Engineering University of Florida Abstract: Modern autonomous systems and robots increasingly employ Linear Temporal Logic (LTL) to express complex planning objectives that involve logical reasoning over temporal events in various applications such as transportation, manufacturing, and military operations. However, traditional planning methods...
Flight testing active flutter control technology on a conventional configuration UAS
Просмотров 1607 месяцев назад
NOTE: No sound until 1:12 Bálint VanekDeputy Director, Systems and Control Lab Hun-Ren Sztaki, Institute for Computer Science and Control, Budapest, Hungary Abstract: The talk will discuss the aircraft design, instrumentation and flight testing considerations leading to the successful flutter controller tests and aeroservoelastic model validation flight test campaign within the EU H2020 project...
Learning and Control for Safety, Efficiency, and Resiliency of Embodied AI
Просмотров 1558 месяцев назад
Fei MiaoAssociate Professor, School of Computing University of Connecticut Abstract: With rapid evolution of sensing, communication, and computation, integrating learning and control presents significant Embodied AI opportunities. However, current decision-making frameworks lack comprehensive understanding of the tridirectional relationship among communication, learning and control, posing chal...
Physics-Guided Data-Driven Modeling for Control in Additive Manufacturing
Просмотров 3008 месяцев назад
Uduak Inyang-Udoh Assistant Professor, Mechanical Engineering University of Michigan, College of Engineering Abstract: Additive Manufacturing (AM) techniques have become attractive for fabricating parts ranging from biological tissues to aircraft components. A key challenge in these techniques is controlling the quality of parts to ensure high accuracy, throughput and repeatability. Given the f...
Optimal and Distributed Control in Animals
Просмотров 3678 месяцев назад
Lisa (Jing Shuang) L Assistant Professor, Electrical Engineering and Computer Science University of Michigan, College of Engineering Abstract: In this talk, I will describe the role of optimal and distributed control in both behavioral and implementation models of animal sensorimotor control. In some sense, animals behave like an optimal controller - but how is this optimal controller implement...
Hierarchical Optimization-Based Control for Agile and Adaptive Legged Robots
Просмотров 1,2 тыс.9 месяцев назад
Hierarchical Optimization-Based Control for Agile and Adaptive Legged Robots
Are CMDPs Fundamentally Harder than MDPs?
Просмотров 4909 месяцев назад
Are CMDPs Fundamentally Harder than MDPs?
Formal Methods for Safety-Critical Control
Просмотров 2329 месяцев назад
Formal Methods for Safety-Critical Control
Resilience in State Estimation and System Identification
Просмотров 20010 месяцев назад
Resilience in State Estimation and System Identification
Energy maximizing control of wave energy systems - the COER way!
Просмотров 11110 месяцев назад
Energy maximizing control of wave energy systems - the COER way!
Research problems of my life: Overview and advice for the inspired
Просмотров 23010 месяцев назад
Research problems of my life: Overview and advice for the inspired
Hierarchical Optimization-Based Control for Agile and Adaptive Legged Robots
Просмотров 94310 месяцев назад
Hierarchical Optimization-Based Control for Agile and Adaptive Legged Robots
Set-Based Methods for Hierarchical Model Predictive Control and Beyond
Просмотров 49411 месяцев назад
Set-Based Methods for Hierarchical Model Predictive Control and Beyond
Control co-design of Renewable Energy Harvesting Systems
Просмотров 157Год назад
Control co-design of Renewable Energy Harvesting Systems
Multi-fidelity Gaussian Processes for Human-Agent Teaming
Просмотров 285Год назад
Multi-fidelity Gaussian Processes for Human-Agent Teaming
Modelling, Dynamics and Control of Aggregate Loads
Просмотров 111Год назад
Modelling, Dynamics and Control of Aggregate Loads
Sink or Swim: Control of Floating Offshore Wind Turbines
Просмотров 325Год назад
Sink or Swim: Control of Floating Offshore Wind Turbines
Modeling and Stability Analysis of Epidemic Dynamics over Networks
Просмотров 1,3 тыс.Год назад
Modeling and Stability Analysis of Epidemic Dynamics over Networks
Enabling a responsive grid with distributed load control and optimization
Просмотров 141Год назад
Enabling a responsive grid with distributed load control and optimization
Wow!
𝓅𝓇o𝓂o𝓈𝓂