
- Видео 13
- Просмотров 362 307
Robotics and ROS Learning
Добавлен 20 янв 2019
Navigation2 in ROS2 | Autonomous Mobile Robot | Nav2 | Behavior Trees | Odrive| Diff drive Robot
This video is about the navigation2 in ros2. We will cover
1. Overview of Navigation2
2. Understanding the concept of Behavior Trees.
3. BT xml flow explanation
4. Point to point navigation Demo on real Hardware
5. Keepout Filter Plugin Demo
6. Speedlimit Filter Plugin Demo.
Upgrade Jetson Nano to Ubuntu 20.04: qengineering.eu/install-ubuntu-20.04-on-jetson-nano.html
Code to the Project: github.com/bandasaikrishna/Nav2_Autonomous_Mobile_Robot
1. Overview of Navigation2
2. Understanding the concept of Behavior Trees.
3. BT xml flow explanation
4. Point to point navigation Demo on real Hardware
5. Keepout Filter Plugin Demo
6. Speedlimit Filter Plugin Demo.
Upgrade Jetson Nano to Ubuntu 20.04: qengineering.eu/install-ubuntu-20.04-on-jetson-nano.html
Code to the Project: github.com/bandasaikrishna/Nav2_Autonomous_Mobile_Robot
Просмотров: 12 892
Видео
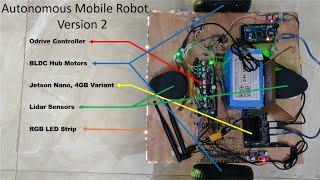

Autonomous Navigation Mobile Robot Version 2 | ROS | Odrive | BLDC Motors| Jetson Nano | RPLidar
Просмотров 23 тыс.2 года назад
This is the my new autonomous mobile robot version 2. This AMR got few updates compared to version 1. If you havent watched my previous video on Autonomous Mobile robot, click on the i button to watch it now. The Major update is the motors. These are BLDC HUB motors with hall encoders. This BLDC motrors are controlled using odrive controller. The odometry is very accurate with the bldc motors a...

Sensor Fusion in Mobile Autonomous Robot | ROS | IMU+Wheel Odometry | Kalman Fliter | Jetson Nano
Просмотров 33 тыс.3 года назад
In this video we will see Sensor fusion on mobile robots using robot_localiztion package. First we will find out the need for sensor fusion, then we will see how to use robot_localization package for sensor fusion and finally will see the comparison of odometry data with and without sensor fusion. We will fuse IMU data with wheel odometry data to get more accurate robot location. I have used MP...
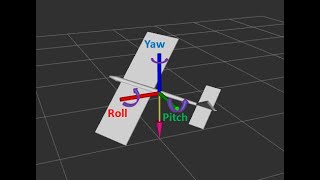
Roll Pitch Yaw from IMU Sensor and Vizualizing it in RVIZ ROS | MPU6050 | Jetson Nano | I2C
Просмотров 22 тыс.3 года назад
In this video we will see how to get orientation quaternions from a IMU sensor-MPU6050. I've used Jetson's I2C bus to directly get the IMU data without using Arduino or any other micro-controller. I have also made a 3D plane model for better visualisation of the rotations in RVIZ. This Project source code: github.com/bandasaikrishna/orientations_from_IMU_MPU_6050 mpu_6050_driver package: github...

Object detection and 3D pose estimation from Point cloud using Realsense depth camera | ROS | PCL
Просмотров 23 тыс.3 года назад
In this project I will use find_object_2d package for object detection and 3D pose estimation. In this project, Intel Realsense D415 is used for rgb-d point cloud. I have explained the working of find_object_2d and its implementation. I'll try to find more robust ways for object detection and 3D pose estimation in future. Stay tuned to my channel. Website: www.rosroboticslearning.com/ Source co...

Autonomous Navigation Mobile Robot using ROS | Jetson Nano | RPLidar | Differential Drive Kinematics
Просмотров 143 тыс.4 года назад
In this video I have shown the working of Autonomous mobile navigation robot using ROS navigation stack. I have 3D printed this robot. This video covers the concepts of ROS navigation stack, kinematics of differential drive, configuring ROS differential drive controller, mapping using slam_gmapping node, localization using AMCL node and mobile robot in action autonomously going to the goal loca...

3D Printed 6 DOF Arm| ROS MOVEIT | UR3 Arm | Inverse Kinematics | Arduino
Просмотров 10 тыс.4 года назад
This is a 3D printed 6 DOF Arm which is a model of UR3 arm. Thanks to LoboCNC for the 3D design and John Lauer for making a detailed video on printing and assembling this arm. This arm uses i2c protocol for communication between micro controllers. Accel stepper library is used to control stepper motors. 3D Designs : Body: www.thingiverse.com/thing:3327968 Actuators: www.thingiverse.com/thing:32...
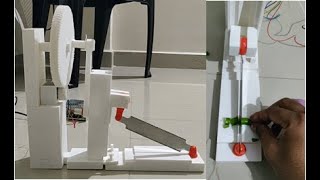
Robotic Vegetable Chopper Part 1 | 3D model | 3D Printing
Просмотров 2,7 тыс.4 года назад
I am trying to build a autonomous Robotic vegetable chopper which can be used in day to day life to cut vegetables without human intervention. So for this project I have 3D modelled a chopper design which can cut vegetables when placed under this. I'm 3D printing a 6-DOF arm for this project to place the vegetables under this chopper. In this video I'll show the design and working of the choppe...

Rotary Encoder As Joint Sensors without Interrupt Routine | DC Motor PID Control | Arduino | I2C
Просмотров 2,7 тыс.5 лет назад
In this video I have shown how to use the rotary encoders without interrupt routines making them independent of micro controller. I have made a circuit which can send the encoder feedback to the controller via i2c. The ICs used in the circuit are PCF8575, D Flip-Flop, 74191, 4093, 4013.Us this circuit and Arduino PID library, I have controlled the speed and position of the DC motor which provid...
Position and Velocity control of a DC motor Using PID | ROS control | rqt_reconfigure| Arduino
Просмотров 28 тыс.5 лет назад
This videos explains how to control the position and velocity of a DC encoder motor using ros_control package. Show how check the behaviour of controllers using rqt_plot and dynamically change the values of P, I and D terms while the motor is running. Link to source code of this Project: github.com/bandasaikrishna/ros_control_example For more details on ROS_CONTROL package, go through below lin...
Six DOF Robotic Arm performing Pick and Place action using ROS Moveit and OpenCV | Arduino
Просмотров 17 тыс.5 лет назад
In this video I am going to demonstrate pick and place using 6-DOF spatial arm. I've used move group pick and place pipeline to achieve this. The inverse kinematics solver used for this manipulator is KDL. The object detection is done using OpenCV. Source code: github.com/bandasaikrishna/6-DOF_Manipulator For more stuff on Robotics and ROS: www.rosroboticslearning.com 3-DOF_Manipulator: ruclips...
Object tracking robot using ROS Moveit and OpenCV | Arduino
Просмотров 13 тыс.5 лет назад
In this video I will explain how to make a manipulator track a coloured object using OpenCV and ROS Moveit. For better understanding watch my previous video on 3-DOF planar manipulator project. Previous Video Link: ruclips.net/video/G-XXnPHYhxs/видео.html Scripts of this project: github.com/bandasaikrishna/3-DOF_Manipulator/tree/master/three_dof_planar_manipulator/scripts For more stuff on Robo...
Inverse Kinematics and Trajectory Execution of a robot manipulator using ROS Moveit and Arduino.
Просмотров 32 тыс.5 лет назад
This is a 3-DOF planar manipulator project which uses Moveit, ros_control package, Ikfast plugin, Interactive marker and Arduino to solve inverse kinematics and execute the specified Trajectory. For more details about this project: www.rosroboticslearning.com/3-dof-planar-manipulator Source code: github.com/bandasaikrishna/3-DOF_Manipulator For more stuff on Robotics and ROS: www.rosroboticslea...