
- Видео 15
- Просмотров 3 218
Jongrok Lee
Добавлен 24 июн 2012
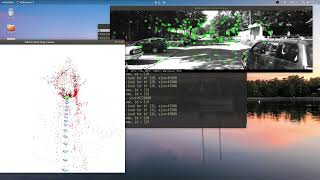
3D LiDAR SLAM w/ Filtering Dynamic Points
I used Point-LIO for Localization of Quadruped Robot.
By Filtering dynamic points, We removed smoke noise and human points effectively.
By Filtering dynamic points, We removed smoke noise and human points effectively.
Просмотров: 127
Видео



Monocular Depth Estimation model 3D Validation
Просмотров 1332 года назад
단안 카메라 거리 추정 모델의 성능을 평가하기 위한 3D Object-wise 검증 모듈

Monocular Depth Estimation mode 2D Validation
Просмотров 1172 года назад
단안 카메라 거리 추정 모델의 성능을 평가하기 위한 2D Object-wise 검증 모듈

Object Detection과 차선 인식 알고리즘을 활용한 자율 주행
Просмотров 2382 года назад
Object Detection 모델: Yolov3-tiny-416 차선 인식 알고리즘: 허프 변환 기반


ORB SLAM2 with Visualizer(PCL) (2/2)
Просмотров 992 года назад
I run the ORB SLAM2 with KITTI dataset by RGBD SLAM. I made Peudo RGBD data with LiDAR depth.
ORB SLAM2 with Visualizer(PCL) (1/2)
Просмотров 812 года назад
I run the ORB SLAM2 with KITTI dataset by RGBD SLAM. I made Peudo RGBD data with LiDAR depth.

Effect of the presence or absence of knee joint on gait
Просмотров 592 года назад
The difference in gait between the compass gait model and a model with knees
Passive Dynamic Walker with flat feet
Просмотров 753 года назад
Passive Dynamic Walker with flat feet by JR Lee
Passive Dynamic Walker with Upper body
Просмотров 1213 года назад
Passive Dynamic Walker with Upper body
Passive Dynamic Walker with arc-shaped feet
Просмотров 1043 года назад
Passive Dynamic Walker with arc-shaped feet
코드좀 알려주실 수 있나요
Hello, i want to know more about the implementation of your surround view, can we talk ?
Sure. No problem
@@leejonglek How do I contact you ?, can you give me email or WhatsApp ?
Is there a source you can recommend
What environment are you simulating in? Can I have the code please? Thank you
I used the matlab. The code is uploaded on my github repository.
github.com/JongRok-Lee/Passive_Dynamic_Walking_Robot
우왕 쩐당
오 관절이 생겼네ㅋㅋㅋㅋㅋㅋㅋㅋ
ㅋㅋㅋㅋㅋㅋ ㅁㅊ 어떻게 찾앗어 ㅋㅋㅋ
ㅋㅋㅋㅋㅋㅋㅋㅋ