
- Видео 96
- Просмотров 106 641
Aparajita Ojha
Индия
Добавлен 23 мар 2020
In this series, I will share with you some of my lectures on deep learning and applications. Stay tuned.
Artificial Intelligence: Introduction -Past, Present and Future
Starting with the early developments in AI, the video gives an introduction to various types of AI based on capabilities or functionalities. A brief introduction to machine learning and deep learning is also given.
Просмотров: 374
Видео


Introduction to Generative Adversarial Networks -Part 2
Просмотров 3084 года назад
Introduction to Generative Adversarial Networks -Part 2

Introduction to Generative Adversarial Networks - Part 1
Просмотров 3564 года назад
Introduction to Generative Adversarial Networks - Part 1
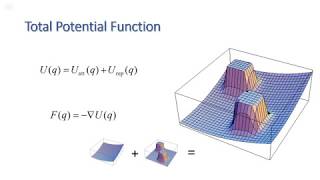
Robot Motion Planning - Artificial Potential Field Method
Просмотров 17 тыс.4 года назад
Robot Motion Planning - Artificial Potential Field Method
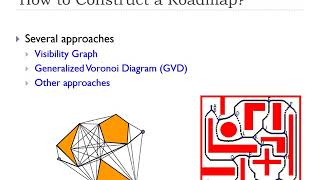
Roadmap Based Path Planning: Visibility Graph and Generalised Voronoi Diagrams as roadmaps
Просмотров 13 тыс.4 года назад
Roadmap Based Path Planning: Visibility Graph and Generalised Voronoi Diagrams as roadmaps

Path Planning and Robot Navigation: Part 1 - Introduction and Bug algorithms
Просмотров 8 тыс.4 года назад
Path Planning and Robot Navigation: Part 1 - Introduction and Bug algorithms

You Only Look Once: Object Detection Algorithm Part 2
Просмотров 7 тыс.4 года назад
You Only Look Once: Object Detection Algorithm Part 2

You Only Look Once - YOLO: Object Detection using Convolutional Neural Networks
Просмотров 36 тыс.4 года назад
You Only Look Once - YOLO: Object Detection using Convolutional Neural Networks

Fractionally Strided or Transposed Convolution through an example
Просмотров 5 тыс.4 года назад
Fractionally Strided or Transposed Convolution through an example
Really good Explanation!
Thank you, professor Aparajita.
Can you please share the slides ?
What is the book name , I couldn’t understand the name !
Principles of Robot Motion Theory, Algorithms, and Implementations by Howie Choset et al.
thank you !@@aparajitaojha807
where i can find the previous part of this session?
What exactly do you want to learn ?
i want to learn hyperledger fabric writing, testing of the chaincode. he mentioned we discuss in previous session was curios waht did i missed@@aparajitaojha807
Hi thank you for the tutorial I tried to delete a car from couchdb container it got deleted (that is fine ) But when i try to query it from queryallCars.js It is also not showing there Does the query script fetch data from couchdb or ledger ?
Super
Thank you
AMAZING. Thank you professor
Thank you so much.
Thank you so much Professor. Amazing and understandable lecture
Thank you
Thanks mam for thid lecture very usefull.
Thank you so much
all the dark blue and dark red text colors on terminal makes impossible to read the commands. Wish you had used a white background or lighter colored text
Thanks for the input. We will use light back ground from now onwards.
is there a link to these collaboration notebooks - would help the pedagogy.
The last error, thats exactly where i am stuck now.
Useful for my project 👏
thank you
You're welcome
thanks mam
Hello mam, Nice explanation Can u plZ tell how we can use gan for data augmentation and deep learning alexnet /resnet-50/ vgg 16 for classification
Hello sir, Nice explanation sir Can u plZ tell how we can use gan for data augmentation and deep learning alexnet /resnet-50/ vgg 16 for classification
If possible please do course on 1... Go programming language 2... Web3. 0 with Ethereum 3... Frontend development with Reactjs
Madam please add what topic going on
Sure, I will
Chain code by -----)) javascript, nodejs & golang
Detailed explanation. Very clear sir.
Sir React js on frontend and solidity , connecting with metamask n ganache is been a a hard topic specially in frontend react js n web3 js is having their own stuff which is very difficult to understand. Pls do one series on Frontend React web3 connecting to ganache using metamask
Thanks a lot Sir for elaborated with eg
from where will we get Zoom Link to jopin live seessions pls
Truffle develop not working showing Error
One of the best solidity use cases described from scratch. Sir we need Supply Chain System and IOT Smart contract in solidity
Excellent mam. Very useful content
I really loved the concept. Very few tutorials teach with mathematics behind and you explained everything very well. Thank you so much Ma'am. I would be happy to know about you ma'am. Please update about section of this channel.
Glad it was helpful!
You made an one hour concept in 14:28 Minutes...Thanks a lot
Thanks
pul vun.fyi
This was very helpful, ma'am. Thank you for making and sharing this!
Thank you. I have a question. How can i find matlab code in potential field method?
No idea
Thank you. If I have my own control law for robot speed based on the commanded poses, is it possible to only leverage the position coordinates from composite pot field? I am only interested in the positions that robot will traverse during the gradient descent
Well explained Mam... with excellent content..
5:34 Is d(q,qg) = (q-qg). Then Grad potential function = Zhi
Please explain more videos on ml for example air index, rainfall, stock prediction, etc
Nice video
thanks
Good explanation, clear enough with suitable example. it will be great if you can share the slides.
Thanks, appreciate it.
Hello mam can u explain that if a image contains 4 objects what is the label vector for that?
For 4 objects, the label will be like this. [ 1, x1,y1, h 1,w1, this is for object 1, 1, x2, y2, h2, w2, ...., 1, x4,y4, h4, w4]
how to give threshold for for 7 x 7 grid ?
What threshold are you talking about ? If it is related to IOU, we generally give a threshold of 0.5 or 0.6. If the data is having very complex samples, then even a small threshold will do.
@@aparajitaojha807 IOU mam thanks now it's clear
loved it
Thanks, I appreciate.
Ma'am what about A* algorithms ? Does they also come in Path planning algorithms?
Yes, it is very used in robot path planning.
hlo mam......can u explain how to develop and execute a code for object detection using cnn
Yes, sure
Nice explaination Prof. Please keep it up & share more and more videos in Robot Nav area
Thank you, glad you like it. Right now busy with my current semester courses. Sure, I will. Regards
If I get an early reply, it would be very helpful, output feature size is 19x19. How they will create a label this downsampled size. How it mapped on to the original size.
19X19 gives information about each grid cell. So each cell corresponds to a pixel block, where one can find if there is an object present or not, using the confidence score. And if the confidence score is high, it predicts the class of the object, by multiplying confidence score with class score. for that pixel block [ cell]. Then for object of the predicted class, it takes into account the box estimation [anchor box], centre height and width. Finally for each grid cell, it gives you object class, and its bounding boxes, if the object is predicted in the box. Hope this is clear.
Simplest way to detect object using Machine learning Checkout the work here. ruclips.net/channel/UCGAhCh-ELf0zFQJZt86622w Enroll here: tiny.cc/googleForm
Thanks!
Thanks for the very clear explanation.
Glad it was helpful!
Simple and nice explanation
Thanks for liking
Hi Mam, The artificial potential method for path planning used the step gradient descent method but the grad of attraction and repulsion where to fit to get main matrix in path planning. lokesh.singh.in@gmail.com
Thanks for watching. Suppose you are at a position x(t) at time step t. The next position at the time step t+1 will be defined using gradient descent. x (t+1) = x)t) - (alpha) grad U(x) . Here we update the sensor inputs to find out if there are obstacles around. Then modify our total potential function U(x) accordingly. Find out it’s gradient by combining both the attractive and repulsive potential. Use it in the formula. Then update x(t+1).
@@aparajitaojha9741 can you ur email id. I will write some code to you in matlab.
I do not use matlab. My email is aojha@iiitdmj.ac.in
@@aparajitaojha807 Then u use python for path planning computation
Lokesh Kumar yes